Kwalifikacja: ELM.01 - Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej
Zawód: Automatyk , Technik automatyk
Kategorie: Czujniki i przetworniki Sterowniki PLC Schematy i dokumentacja
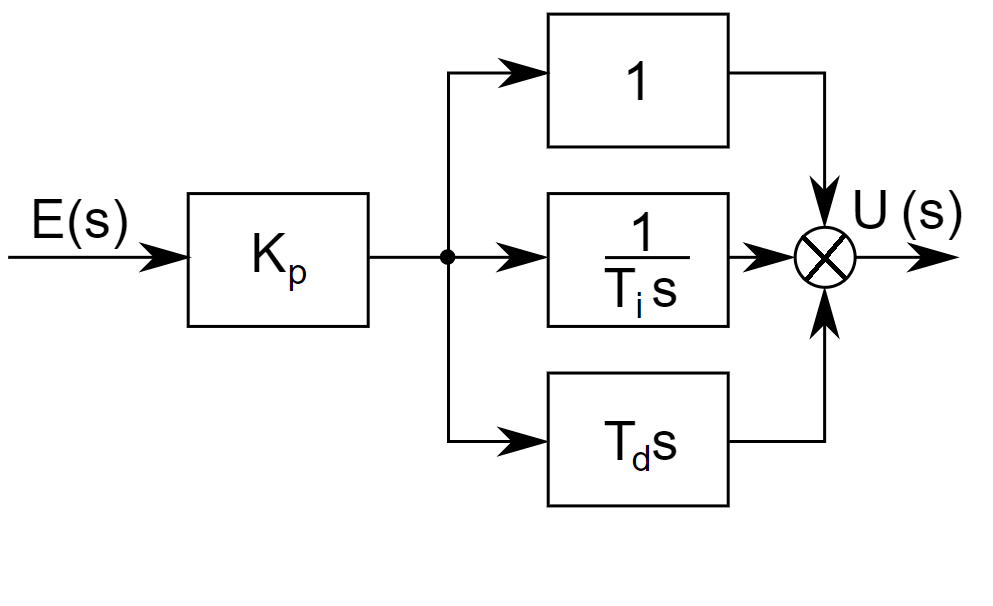
Na rysunku przedstawiono schemat blokowy regulatora
Odpowiedzi
Informacja zwrotna
Świetnie, że wskazałeś PID jako poprawną odpowiedź! Ten schemat blokowy rzeczywiście pokazuje regulator PID, który składa się z trzech członów: proporcjonalnego (P), całkującego (I) i różniczkującego (D). Każdy z tych członów odpowiada za określony aspekt działania regulatora. Proporcjonalny człon (Kp) reaguje proporcjonalnie do błędu, co pozwala na szybkie reagowanie na zmiany. Całkujący człon (1/TiS) eliminuje uchyb ustalony przez sumowanie błędu w czasie, co jest kluczowe, gdy potrzebujemy wysokiej precyzji i dokładności. Różniczkujący człon (TdS) z kolei przewiduje przyszłe zachowanie układu na podstawie szybkości zmiany błędu, co pomaga w tłumieniu oscylacji i nadmiernych przeregulowań. W praktyce, PID jest stosowany w różnych branżach, od przemysłu chemicznego po systemy sterowania temperaturą, ponieważ pozwala na precyzyjne i stabilne sterowanie. Ciekawe jest to, że odpowiednie dostrojenie tych trzech parametrów (Kp, Ti, Td) może znacząco poprawić wydajność systemu. Warto również wspomnieć, że w dziedzinie automatyki istnieją różne metody konfiguracji PID, jak Ziegler-Nichols czy Cohen-Coon, które pomagają w ustalaniu optymalnych wartości tych parametrów.