Kwalifikacja: ELM.01 - Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej
Zawód: Automatyk , Technik automatyk
Kategorie: Sterowniki PLC Schematy i dokumentacja
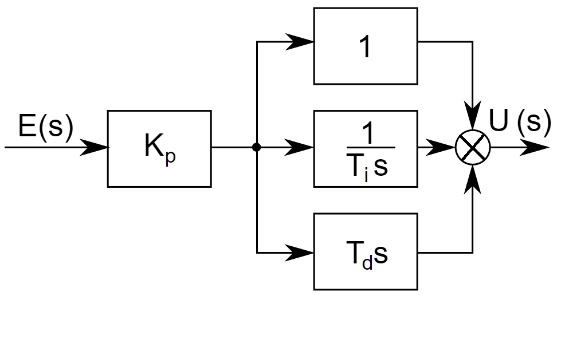
Na rysunku przedstawiono schemat blokowy regulatora
Odpowiedzi
Informacja zwrotna
Regulator PID, czyli Proporcjonalno-Całkująco-Różniczkujący, to jeden z najczęściej stosowanych regulatorów w przemyśle. Schemat, który właśnie widzisz, przedstawia wszystkie trzy elementy składowe tego regulatora: składową proporcjonalną, całkującą i różniczkującą. K_p odpowiada za reakcję proporcjonalną, która jest proporcjonalna do bieżącego błędu. Element 1/T_i s to część całkująca, która sumuje błędy w czasie, co pomaga zredukować błąd ustalony. T_d s to składowa różniczkująca, która przewiduje przyszłe błędy na podstawie tempa zmian. W praktyce PID jest niezastąpiony tam, gdzie wymagana jest precyzyjna kontrola – w systemach HVAC, w automatyce przemysłowej, a nawet w robotyce. Dobór właściwych parametrów K_p, T_i, T_d jest kluczowy i często wymaga tuningu metodą Zieglera-Nicholsa lub metodą prób i błędów. Moim zdaniem, każda osoba zajmująca się automatyką powinna dobrze znać zastosowanie i działanie regulatorów PID.