Kwalifikacja: ELM.01 - Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej
Zawód: Automatyk , Technik automatyk
Kategorie: Sterowniki PLC Pomiar i diagnostyka
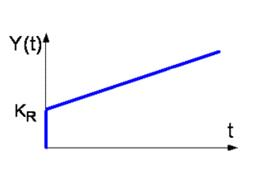
Odpowiedź skokowa regulatora ciągłego przedstawiona na rysunku wskazuje, że w układzie regulacji zastosowano regulator typu
Odpowiedzi
Informacja zwrotna
Regulator PI, czyli proporcjonalno-całkujący, jest często stosowany w układach regulacji, ponieważ łączy zdolność szybkiej reakcji na zmiany z precyzyjnym osiąganiem wartości zadanej. Na prezentowanym wykresie widzimy, że odpowiedź skokowa regulatora ma początkowy skok, który odpowiada części proporcjonalnej (P), a następnie liniowe narastanie, co jest charakterystyczne dla części całkującej (I). Dzięki temu regulator PI jest w stanie nie tylko szybko zareagować na zmiany, ale również wyeliminować uchyb ustalony, co jest jego kluczową zaletą w stosunku do regulatorów P. W praktyce oznacza to, że PI jest często używany w systemach, gdzie dokładność jest kluczowa, na przykład w regulacji temperatury czy prędkości obrotowej. W wielu aplikacjach przemysłowych stosuje się algorytmy PI ze względu na ich prostotę i efektywność, a także łatwość implementacji w układach cyfrowych. Warto też zaznaczyć, że dobór parametrów regulatora PI, takich jak wzmocnienie proporcjonalne i czas całkowania, jest kluczowy dla osiągnięcia optymalnej wydajności systemu. Optymalizacja tych parametrów często bazuje na metodach takich jak Ziegler-Nichols, które pozwalają na szybkie i skuteczne dostrojenie regulatora do specyfiki danego układu.