Kwalifikacja: ELM.01 - Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej
Zawód: Automatyk , Technik automatyk
Kategorie: Sterowniki PLC Pomiar i diagnostyka
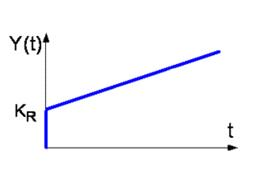
Odpowiedź skokowa regulatora ciągłego przedstawiona na rysunku wskazuje, że w układzie regulacji zastosowano regulator typu
Odpowiedzi
Informacja zwrotna
Odpowiedź PI wskazuje na regulator proporcjonalno-całkujący. Na wykresie widzimy charakterystyczny skok, a następnie liniowy przyrost w czasie. To typowe dla PI, który reaguje zarówno na bieżący błąd, jak i jego całkę w czasie. Dlatego jest skuteczny w eliminowaniu uchybu ustalonego. Zastosowanie regulatora PI znajdziesz w systemach, gdzie wymagana jest stabilność i precyzja, jak w regulacji temperatury pieca czy prędkości silnika. W praktyce PI jest często używany, bo łączy prostotę P z eliminacją błędu stałego przez I. Standardy branżowe często zalecają PI w procesach, gdzie nie są potrzebne szybkie reakcje na zakłócenia, jak w przypadku PD lub PID. PI daje stabilność w systemach z długimi czasami odpowiedzi. Z mojego doświadczenia, PI jest nieoceniony w aplikacjach, gdzie precyzja jest kluczowa, a zakłócenia mają charakter wolno zmieniający się.