Kwalifikacja: ELM.01 - Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej
Zawód: Automatyk , Technik automatyk
Kategorie: Czujniki i przetworniki Sterowniki PLC
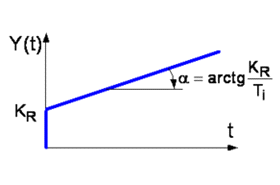
Odpowiedź skokowa regulatora ciągłego przedstawiona na rysunku wskazuje, że w układzie regulacji zastosowano regulator typu
Odpowiedzi
Informacja zwrotna
Regulator PI jest często stosowany w układach automatyki, gdzie wymagana jest korekcja błędu w sposób ciągły i precyzyjny. Na wykresie widzimy charakterystyczną odpowiedź skokową tego typu regulatora, która wskazuje na sumę proporcjonalnej i całkującej części. Część proporcjonalna, oznaczona jako K_R, odpowiada za szybkie reagowanie na zmiany, zaś część całkująca, charakteryzująca się stałą czasową T_i, wpływa na eliminację błędów ustalonych. Moim zdaniem, takie podejście jest niezwykle przydatne w układach, gdzie precyzja i stabilność są kluczowe, na przykład w systemach grzewczych lub klimatyzacyjnych. Standardy branżowe, takie jak ISA S5.1, zalecają stosowanie regulatorów PI w wielu aplikacjach przemysłowych ze względu na ich zdolność do utrzymania stabilności bez nadmiernego uchybu. W praktyce, znajomość odpowiednich parametrów regulacji umożliwia inżynierom dostosowanie układu do specyficznych wymagań operacyjnych, co jest kluczowe w dynamicznie zmieniających się środowiskach przemysłowych.