Pytanie 1
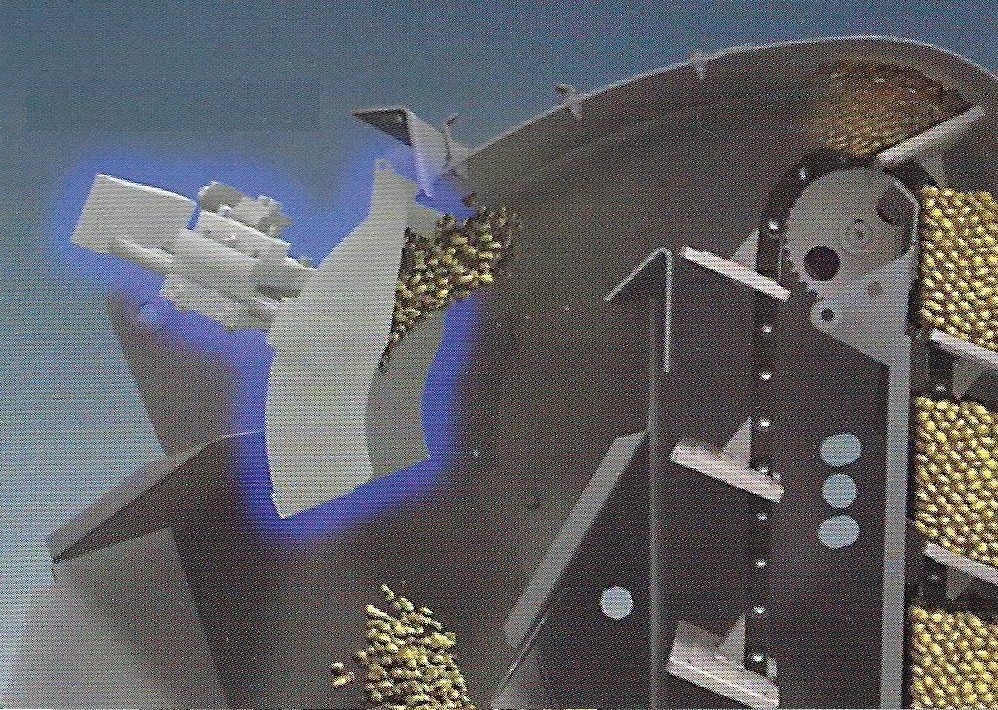
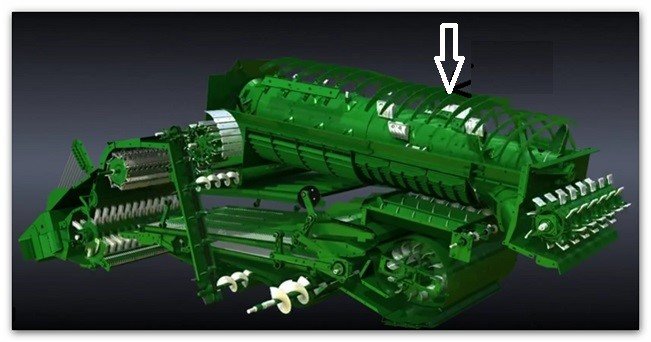
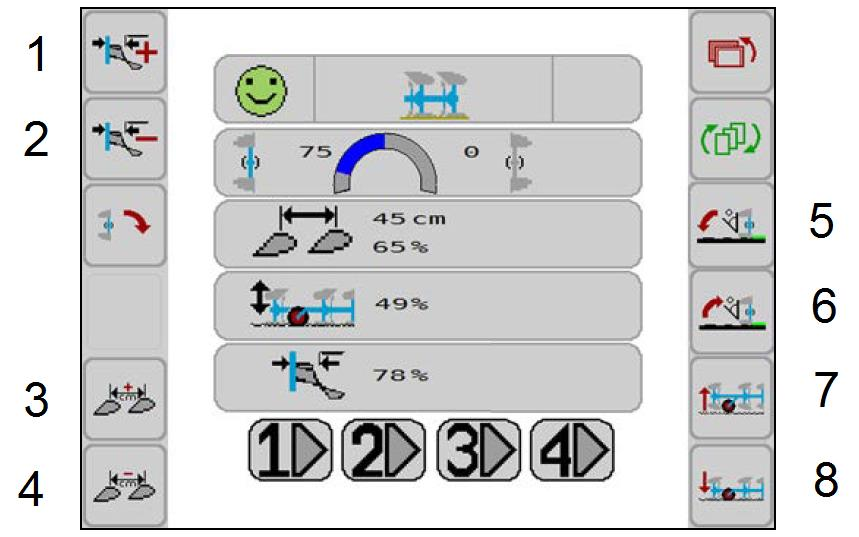
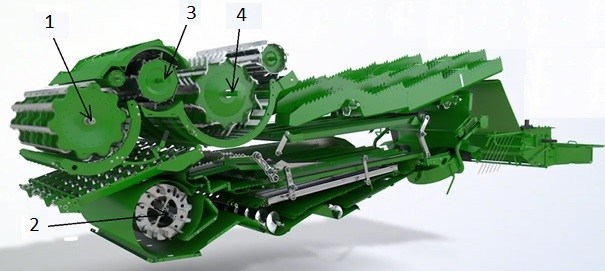
Widoczne na ilustracji urządzenie w kombajnie zbożowym to
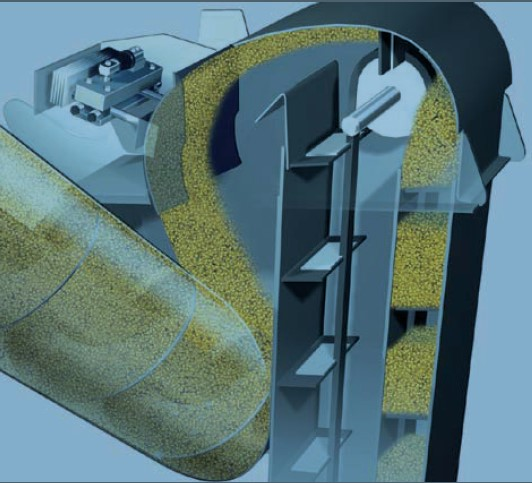
A. czujnik pomiaru plonu.
B. czujnik wilgotności zboża.
C. analizator uszkodzenia ziarna.
D. analizator zanieczyszczenia ziarna.
Na ilustracji pokazano typowy czujnik pomiaru plonu zamontowany w elewatorze ziarnowym kombajnu. Ten element mierzy masę strumienia ziarna, który przemieszcza się po ścianie czujnika lub uderza w powierzchnię pomiarową. Najczęściej stosuje się tu rozwiązania tensometryczne: ziarno naciska na płytę lub łopatkę, a siła jest przeliczana przez elektronikę na aktualny przepływ masowy ziarna. Po połączeniu tej informacji z prędkością jazdy kombajnu i szerokością hedera, komputer pokładowy wylicza plon w t/ha i tworzy mapę plonu. W nowoczesnych maszynach dane z czujnika plonu są zapisywane w terminalu i później eksportowane do programów do zarządzania gospodarstwem lub oprogramowania GIS. To jest podstawa rolnictwa precyzyjnego: na podstawie map plonu planuje się zmienne nawożenie, siew czy ochronę roślin w kolejnych latach. Moim zdaniem dobrze jest kojarzyć, że czujnik plonu zawsze siedzi właśnie w elewatorze ziarna, a nie w zbiorniku czy na ślimaku. Ważna jest też jego regularna kalibracja – producenci (np. John Deere, Claas, New Holland) zalecają coroczne ważenie kontrolne przy różnych wydajnościach, bo bez tego wskazania plonu potrafią się rozjechać o kilkanaście procent. Dobrą praktyką jest też czyszczenie powierzchni czujnika z osadów i pyłu, żeby nie przekłamywał sygnału tensometrycznego.