Pytanie 1
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wynik: 38/40 punktów (95,0%)
Wymagane minimum: 20 punktów (50%)
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Która z liter adresowych zastosowanych w poniższej instrukcji programowania obrabiarki oznacza szybkość posuwu?
| CNC N120 G31 X50 Z-30 D-2 F3 Q3 |
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Ekonomiczne oraz szerokie regulowanie prędkości obrotowej silnika prądu stałego bocznikowego możliwe jest przez
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wartość parametru 20 V/1000 obr/min jest charakterystyczna dla
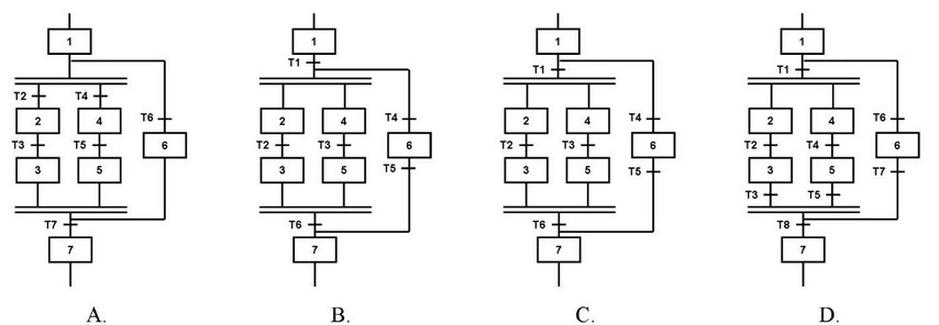
Który schemat jest zgodny z zasadami tworzenia algorytmów sterowania sekwencyjnego?
Który element układu elektronicznego przedstawiono na ilustracji?

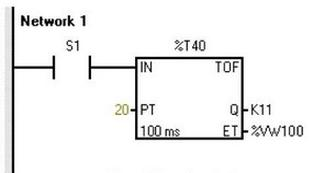
Którą zmianę należy wprowadzić w programie przedstawionym na rysunku, aby po wciśnięciu przycisku normalnie otwartego S1 wyjście Q timera zostało aktywowane i deaktywowane 20 sekund po zwolnieniu przycisku S1?
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
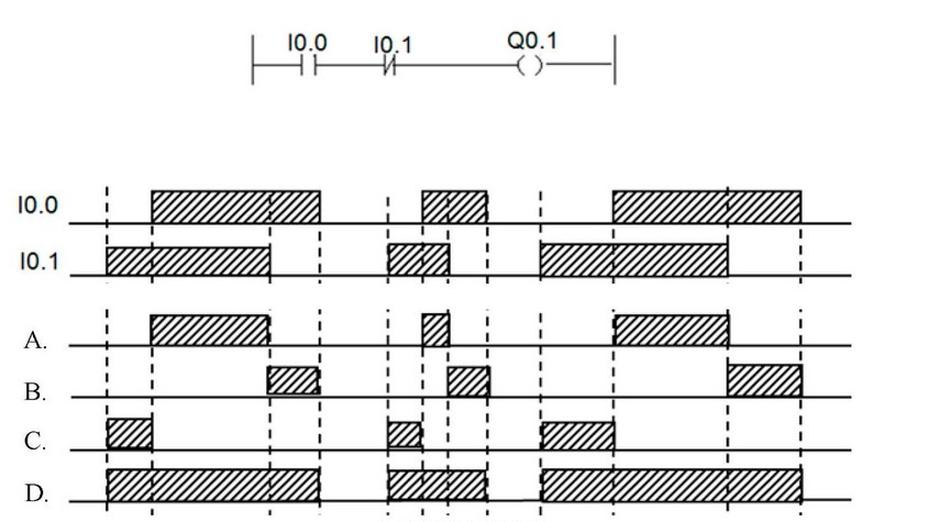
Który z przebiegów przedstawia prawidłowe stany wyjścia Q0.1 dla stanów wejść I0.0 i I0.1, jeżeli zależność pomiędzy zmiennymi opisana jest programem?
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jaki program jest używany do projektowania obiektów w 3D?
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
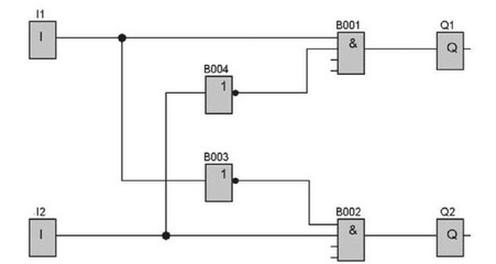
Która kombinacja stanów logicznych nigdy nie pojawi się na wyjściach sterownika działającego zgodnie z przedstawionym programem?
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
W przypadku siłownika zasilanego powietrzem pod ciśnieniem równym 8 barów, który jest w stanie wykonać maksymalnie nmax = 50 cykli/min, a w trakcie jednego cyklu zużywa 1,4 litra powietrza, jakie powinny być parametry sprężarki do jego zasilania?
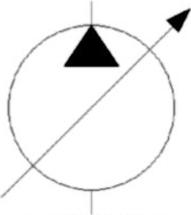
Jakiego rodzaju pompa przedstawiana jest za pomocą zamieszczonego symbolu graficznego?
Ile poziomów kwantyzacji oraz jaka jest rozdzielczość napięciowa przetwornika A/C w urządzeniu mechatronicznym o zakresie pomiarowym 0÷10 V i rozdzielczości 10 bitów?
Aby zmienić wartość skoku gwintu, należy dostosować wartość numeryczną obok litery adresowej
N100 G00 X55 Z5
N110 T3 S80 M03
N120 G31 X50 Z-30 D-2 F3 Q3
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jaki adres, przyznawany przez producenta w sieci, pozostaje stały w trakcie działania urządzenia i jednoznacznie je identyfikuje?
W specyfikacji silnika można znaleźć oznaczenie S2 40. Pracując z układem wykorzystującym ten silnik, trzeba mieć na uwadze, aby
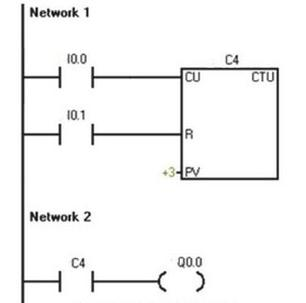
W przedstawionym na rysunku programie sterowania, na wyjściu Q0.0 sygnał logiczny 1 pojawi się po zliczeniu 3 impulsów
Jakiej z wymienionych funkcji nie może realizować pracownik obsługujący prasę hydrauliczną, która jest sterowana przy pomocy sterownika PLC?
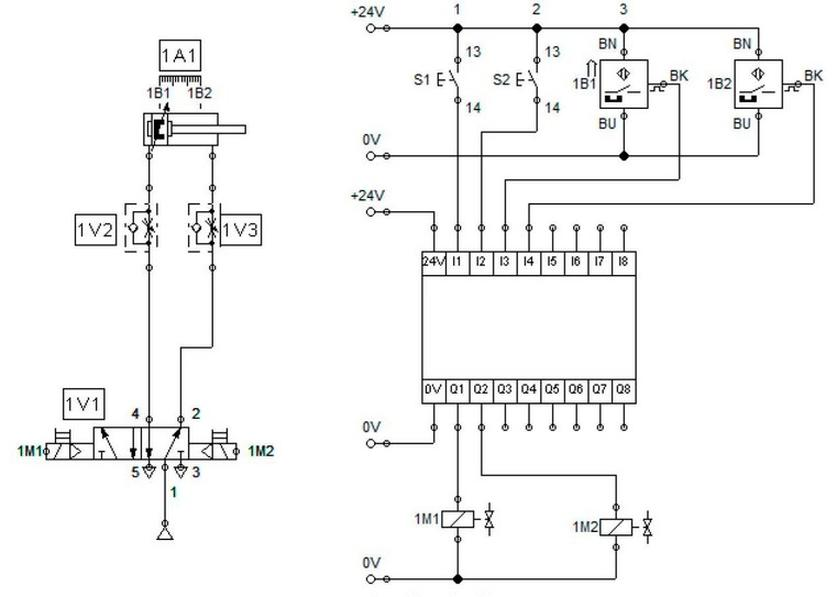
Który typ czujników 1B1 i 1B2 należy zastosować w układzie sterowania przedstawionym na rysunkach?
Trójfazowy silnik indukcyjny klatkowy zasilany nominalnym napięciem uruchamia się i działa prawidłowo, lecz po obciążeniu zbyt mocno się nagrzewa. W jaki sposób można ustalić przyczynę?
Do którego portu komputera PC należy podłączyć przedstawiony na ilustracji kabel komunikacyjny?

Co opisuje pojęcie 'histereza' w kontekście przetworników ciśnienia?
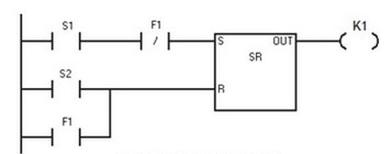
Na podstawie analizy przedstawionego fragmentu programu określ, dla którego stanu sygnałów wejściowych na wyjściu przerzutnika RS zostanie ustawiona logiczna jedynka?
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
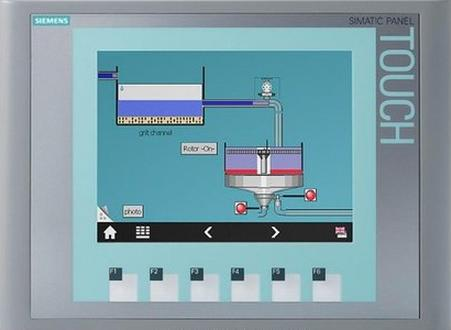
Urządzenie przedstawione na rysunku, w projektowanym systemie mechatronicznym, będzie mogło pełnić funkcję
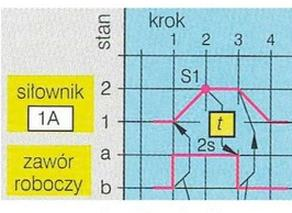
Na diagramie stanów został przedstawiony cykl pracy siłownika 1A i zaworu roboczego sterującego tym siłownikiem. Określ, w jakim momencie pracy siłownika rozpoczyna się odliczanie opóźnienia czasowego 2 s.
Oprogramowanie komputerowe, które monitoruje procesy w systemach i posiada kluczowe funkcje takie jak gromadzenie, wizualizacja oraz archiwizacja danych, a także alarmowanie i kontrolowanie przebiegu procesu, to oprogramowanie
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla zalogowanych użytkowników. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.