Pytanie 1
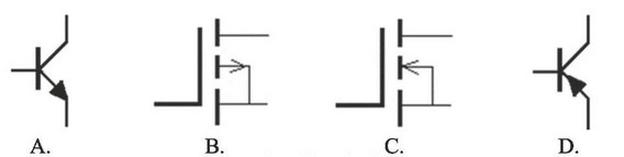
Którego z przedstawionych symboli graficznych należy użyć do narysowania schematu układu elektronicznego zawierającego tranzystor bipolarny npn?
A. C.
B. D.
C. A.
D. B.
W odpowiedzi A mamy symbol tranzystora NPN, który jest naprawdę ważny w elektronice. Tego typu tranzystory często wykorzystuje się do wzmacniania sygnałów i w różnych układach przełączających. Strzałka na emitera pokazuje, w którą stronę płynie prąd, a to jest kluczowe dla jego prawidłowego działania. W praktyce, dzięki tym symbolom, inżynierowie mogą szybko zrozumieć, jak działa dany tranzystor w układzie. Warto też wspomnieć, że korzystanie ze standardowych symboli, jak ten dla tranzystora NPN, jest zgodne z normami, np. IEC 60617. To pomaga wszystkim inżynierom i technikom lepiej się komunikować podczas pracy nad schematami, co zdecydowanie podnosi efektywność pracy zespołowej.