Pytanie 1
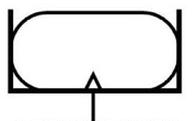
Na diagramach systemów hydraulicznych przyłącze rury odpływowej rozdzielacza oznacza się symbolem literowym
A. P
B. A
C. T
D. B
Odpowiedź T jest poprawna, ponieważ w symbolice hydraulicznej oznaczenie literowe T odnosi się do przyłącza przewodu odpływowego w układach hydraulicznych. T jest skrótem od angielskiego terminu 'tank line', co wskazuje na przewód, którym olej hydrauliczny wraca do zbiornika. To kluczowe w projektowaniu układów hydraulicznych, ponieważ odpowiednie oznaczenia zapewniają właściwą identyfikację linii oraz ich funkcji w systemie. Używanie standardowych symboli, takich jak T dla linii powrotnej, jest istotne dla zrozumienia schematów przez techników i inżynierów, co przyczynia się do minimalizacji błędów w instalacjach. W praktyce, znajomość tych oznaczeń jest niezbędna podczas serwisowania i diagnozowania układów hydraulicznych, co wpływa na efektywność i bezpieczeństwo ich użytkowania. Standardy branżowe, takie jak ISO 1219, określają zasady oznaczania komponentów hydraulicznych, co ułatwia komunikację i współpracę w ramach zespołów projektowych.