Pytanie 1
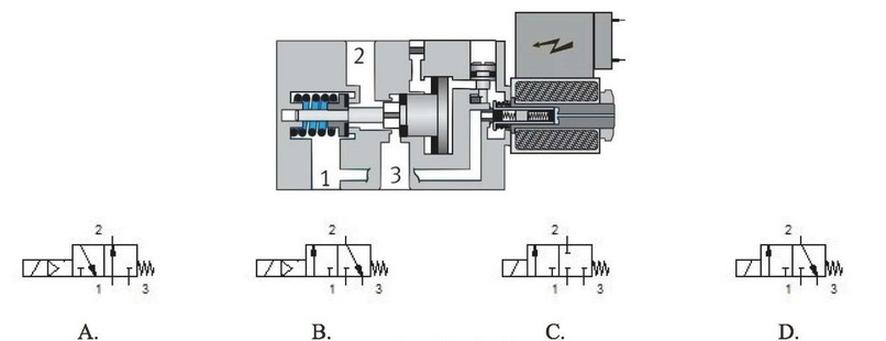
W schemacie układu hydraulicznego przyłącze rury zasilającej rozdzielacza oznaczane jest literą
A. T
B. B
C. A
D. P
Niepoprawne odpowiedzi, jak B, T czy A, wskazują na jakieś nieporozumienia w symbolice hydraulicznej. Symbol B zazwyczaj oznacza odpływ, więc można pomyśleć, że dotyczy przyłącza zasilającego, ale to nie to. Odpływ odprowadza medium robocze, a nie je dostarcza. Symbol T natomiast to powrót oleju do zbiornika, co też nie jest związane z przyłączem zasilającym. Używanie tych symboli w niewłaściwy sposób może powodować błędy w projektowaniu i używaniu układów hydraulicznych, co w praktyce może prowadzić do problemów z maszynami. Co do symboli A i B, to one oznaczają wyjścia robocze, więc też nie mają nic wspólnego z zasilaniem. Rozumienie tych różnic jest naprawdę kluczowe, żeby unikać typowych błędów w analizie schematów hydraulicznych. Jeśli nie ogarniasz tej symboliki, to może być nieefektywna instalacja i wyższe koszty. Dlatego ważne, by każdy, kto z tym pracuje, miał dobry przegląd oznaczeń i ich zastosowania.