Pytanie 1
Na rysunku przedstawiono zależność współczynnika siły nośnej Cz od kąta natarcia α. Cyfrą 3 zaznaczono profil gładki (wyjściowy). Cyfrą 2 oznaczono
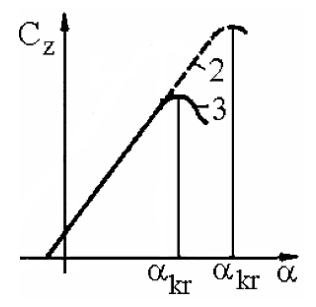
A. wychylenie slotów.
B. wychylenia hamulców aerodynamicznych.
C. wychylenie klap przednich.
D. wychylenie klap tylnych.
W przypadku udzielenia odpowiedzi dotyczącej wychylenia hamulców aerodynamicznych, slotów czy klap przednich, warto zauważyć, że każda z tych opcji odnosi się do różnych mechanizmów regulujących aerodynamikę samolotu, które nie są jednak związane z zaobserwowaną zmianą w wykresie. Hamulce aerodynamiczne mają na celu zmniejszenie prędkości samolotu poprzez zwiększenie oporu powietrza, co jest procesem, który nie prowadzi do zwiększenia siły nośnej, lecz wręcz przeciwnie. Z kolei sloty, umiejscowione w przedniej części skrzydła, służą do poprawy przepływu powietrza wokół skrzydła i zwiększenia wydajności przy dużych kątach natarcia, ale ich działanie nie jest bezpośrednio związane z analizowanym wykresem, który pokazuje wzrost siły nośnej przy użyciu klap tylnych. Klapy przednie również mają na celu zwiększenie siły nośnej, jednak ich wychylenie nie jest związane z modyfikacjami przedstawionymi na wykresie, ponieważ konkretna zmiana wskazuje na klapy tylne. Typowe błędy myślowe, które prowadzą do nieprawidłowych odpowiedzi, obejmują mylenie różnych typów elementów aerodynamicznych oraz nieuwzględnianie ich wpływu na charakterystyki lotu w różnych warunkach. Właściwe zrozumienie funkcji każdego z tych mechanizmów jest kluczowe dla efektywnego projektowania i eksploatacji samolotów.