Pytanie 1
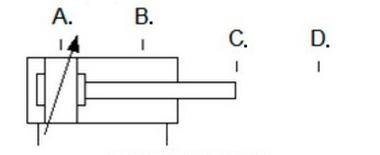
Jakie urządzenie napędowe ma następujące parametry: średnica tłoka – 42 mm, średnica tłoczyska – 32 mm, skok tłoka – 150 mm, ciśnienie nominalne – 24 MPa, maksymalna prędkość tłoka – 10 m/s, częstotliwość pracy – 10 Hz?
A. Silnik pneumatyczny
B. Siłownik pneumatyczny
C. Siłownik hydrauliczny
D. Silnik hydrauliczny
Wybór silnika pneumatycznego lub siłownika pneumatycznego byłby niewłaściwy z kilku kluczowych względów. Po pierwsze, pneumatyka opiera się na sprężonym powietrzu jako medium roboczym, co ogranicza siłę generowaną przez urządzenie w porównaniu do hydrauliki, gdzie wykorzystuje się ciecz pod dużym ciśnieniem. W przykładzie podano ciśnienie nominalne 24 MPa, co jest typowe dla systemów hydraulicznych, a nie pneumatycznych, gdzie maksymalne ciśnienia są zazwyczaj znacznie niższe, wynoszące kilka barów. Dodatkowo, siłowniki pneumatyczne mają inną charakterystykę działania, w której skok i prędkość tłoka mogą być znacznie ograniczone z uwagi na naturalne właściwości sprężonego powietrza - jego kompresyjność i podatność na zmiany objętości. Z kolei silnik hydrauliczny, mimo że również korzysta z ciśnienia hydraulicznego, ma na celu przekształcenie energii hydraulicznej na ruch obrotowy, co nie odpowiada właściwościom opisanym w pytaniu, gdyż dotyczy ono ruchu linearnego. Dlatego powszechnym błędem jest mylenie zastosowań i charakterystyk tych urządzeń, co może prowadzić do niewłaściwego doboru sprzętu w praktyce przemysłowej, a tym samym do obniżenia wydajności oraz zwiększenia kosztów eksploatacji.