Pytanie 1
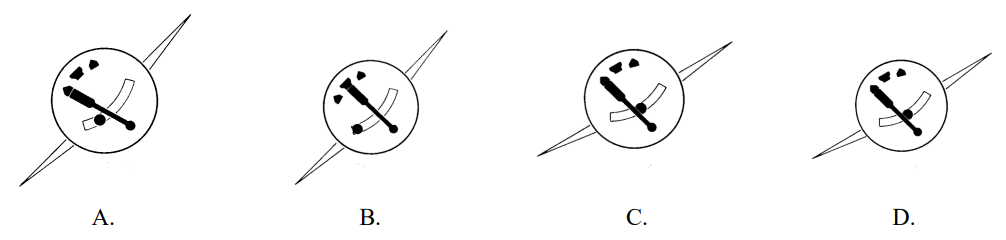
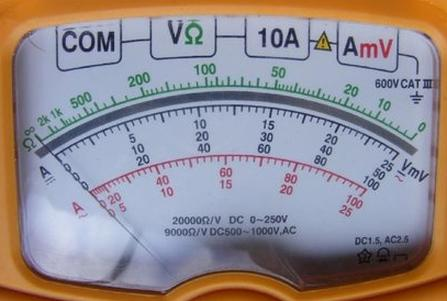
Stała skali przyrządu pomiarowego przedstawionego na rysunku dla zakresu 250 VDC jest równa
A. 5,0 V/dz
B. 2,5 V/dz
C. 10 V/dz
D. 1,25 V/dz
Wybór nieprawidłowej odpowiedzi na to pytanie może wynikać z kilku nieporozumień dotyczących obliczeń związanych ze stałą skali przyrządu pomiarowego. Często błędne odpowiedzi, takie jak 10 V/dz, 2,5 V/dz czy 1,25 V/dz, mogą sugerować niewłaściwe podejście do podziału zakresu pomiarowego na liczbę działek. Na przykład, odpowiedź 10 V/dz mogłaby wynikać z błędnego założenia, że zakres 250 V można podzielić przez zbyt małą liczbę działek, co prowadzi do nieadekwatnego oszacowania. Z kolei odpowiedzi 2,5 V/dz oraz 1,25 V/dz mogą odzwierciedlać mylenie liczby działek ze skalą, przez co nie biorą pod uwagę rzeczywistego podziału 250 V na 50 działek. Zrozumienie, że każdy pomiar wymaga precyzyjnych obliczeń oraz dobrej znajomości przyrządów pomiarowych, jest kluczowe w praktyce inżynieryjnej. Pomiar napięcia w zastosowaniach przemysłowych oraz laboratoryjnych wymaga nie tylko znajomości zasad pomiarów, ale także umiejętności analizy wyników, co jest niezbędne do uniknięcia błędów. Pamiętajmy, że każdy przyrząd pomiarowy ma swoją specyfikę, a błąd w obliczeniach może prowadzić do nieprawidłowych wniosków oraz potencjalnych problemów podczas eksploatacji.