Pytanie 1
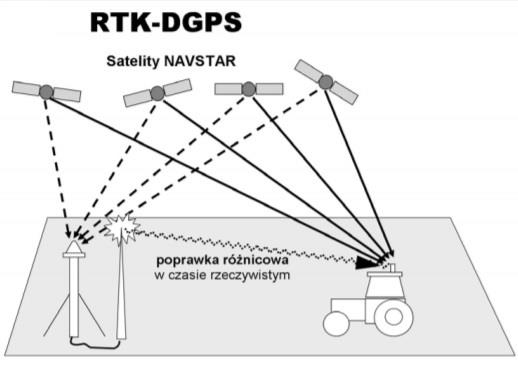
Korzystając ze stacji RTK, granice pola należy rejestrować
A. raz w miesiącu.
B. co roku.
C. tylko raz.
D. każdorazowo przed rozpoczęciem prac.
Wokół częstotliwości rejestrowania granic pola przy pracy z RTK pojawia się sporo nieporozumień. Wielu osobom intuicyjnie wydaje się, że skoro wykonuje się nowe prace polowe co sezon, to granice też trzeba „odświeżać” co roku albo nawet co miesiąc. To jest typowy błąd myślowy wynikający z mylenia zmiennych obiektów polowych, jak np. ścieżki technologiczne, z obiektami stałymi, jak granica geodezyjna działki. Technologia RTK działa w odniesieniu do stałego układu współrzędnych (np. krajowego układu geodezyjnego) i stacji bazowej, dlatego raz poprawnie zarejestrowane granice pozostają aktualne tak długo, jak nie zmieni się fizyczny przebieg granicy lub nie nastąpi poważna zmiana w infrastrukturze geodezyjnej. Rejestrowanie granic co roku czy raz w miesiącu nie daje żadnej dodatkowej korzyści technicznej, a tylko marnuje czas operatora i wprowadza ryzyko, że za każdym razem linia zostanie nagrana trochę inaczej, np. z powodu błędów obsługi, innej trajektorii przejazdu czy gorszych warunków odbioru sygnału GNSS. Pojawia się też problem spójności danych: kilka wersji tej samej granicy może potem mieszać w systemach Section Control i mapach aplikacyjnych. Z kolei pomysł, żeby rejestrować granice każdorazowo przed rozpoczęciem prac, wynika często z przyzwyczajenia do pracy „na ślad” bez stabilnego odniesienia, gdzie każdy nowy przejazd jest traktowany jak nowy punkt odniesienia. W RTK nie o to chodzi. Tu bazujemy na dokładnym, trwałym odwzorowaniu pola w układzie współrzędnych, które zapisujemy raz i konsekwentnie używamy przez kolejne sezony. Dobrą praktyką branżową jest jedynie aktualizacja granic wtedy, gdy faktycznie nastąpiła zmiana w terenie: poszerzenie pola, przesunięcie miedzy, nowy rów czy droga. Wtedy wykonuje się korektę odcinka, a nie ciągłe „rejestrowanie od zera”.