Pytanie 1
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wynik: 8/40 punktów (20,0%)
Wymagane minimum: 20 punktów (50%)
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jakie urządzenie stosuje się do pomiaru rezystancji izolacji w systemach mechatronicznych?
W programie PLC sygnały niskie lub wysokie przypisane m.in. do wejść i wyjść dyskretnych powinny być definiowane jako zmienne w formacie
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Na podstawie fragmentu instrukcji serwisowej wskaż prawdopodobną przyczynę nieprawidłowej pracy urządzenia, jeżeli na jego wyświetlaczu wyświetla się kod błędu FA.
| KODY BŁĘDÓW | ||
|---|---|---|
| Nr | Kod błędu | Problem |
| 1. | E1 | Usterka czujnika temperatury pomieszczenia |
| 2. | E2 | Usterka czujnika temperatury wymiennika zewn. |
| 3. | E3 | Usterka czujnika temperatury wymiennika wewn. |
| 4. | E4 | Usterka silnika jednostki wewnętrznej lub problem z sygnałem zwrotnym |
| 5. | E5 | Brak komunikacji między jednostkami wewn. i zewn. |
| 6. | F0 | Usterka silnika prądu stałego wentylatora jednostki zewn. |
| 7. | F1 | Uszkodzenie modułu IPM |
| 8. | F2 | Uszkodzenie modułu PFC |
| 9. | F3 | Problem ze sprężarką |
| 10. | F4 | Błąd czujnika temperatury przegrzania |
| 11. | F5 | Zabezpieczenie temperatury głowicy sprężarki |
| 12. | F6 | Błąd czujnika temperatury otoczenia jednostki zewn. |
| 13. | F7 | Zabezpieczenie przed zbyt wysokim lub za niskim na- pięciem zasilania |
| 14. | F8 | Błąd komunikacji modułów jednostki zewnętrznej |
| 15. | F9 | Błąd pamięci EEPROM jednostki zewnętrznej |
| 16. | FA | Błąd czujnika temperatury ssania (uszkodzenie zaworu 4 drogowego) |
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
W trakcie konserwacji układu przekaźników, który jest zabezpieczony bezpiecznikiem topikowym, należy przeprowadzić inspekcję układu, oczyścić go oraz
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
W systemie mechatronicznym planowane jest użycie sieci polowej AS-i w wersji 2.0. Jaką maksymalną ilość urządzeń podrzędnych jedno urządzenie główne (master) może obsługiwać?
Który symbol graficzny należy zastosować do przedstawienia na schemacie zaworu szybkiego spustu?

To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
W podręczniku obsługi silnika zasilanego napięciem 400 V i kontrolowanego przez PLC powinna być zawarta informacja: Przed rozpoczęciem prac konserwacyjnych należy odłączyć wszystkie obwody zasilające.
Aby zmienić kierunek obrotu wirnika silnika bocznikowego prądu stałego bez przesterowania maszyny, co należy zrobić?
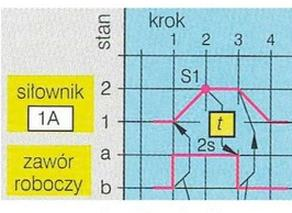
Na diagramie stanów został przedstawiony cykl pracy siłownika 1A i zaworu roboczego sterującego tym siłownikiem. Określ, w jakim momencie pracy siłownika rozpoczyna się odliczanie opóźnienia czasowego 2 s.
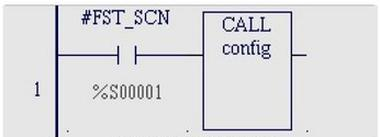
Zmienna systemowa #FST_SCN (pierwsze skanowanie) pozwala wykonywać podprogram "config"
Jaka będzie reakcja wyjścia Q1 sterownika, realizującego program przedstawiony na schemacie, przy sygnałach wejściowych I1 = 12 = 1?

To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
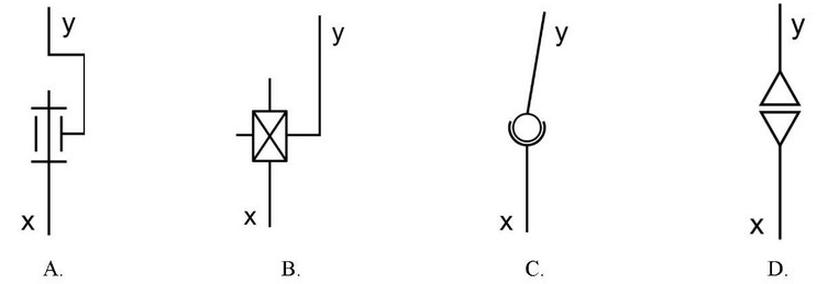
Którego symbolu należy użyć na schemacie kinematycznym, aby symbolicznie przedstawić połączenie przegubowe dwóch członów (elementów) manipulatora? x, y – człony (elementy) manipulatora
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jakie stany powinny się pojawić na kolejnych wyjściach bramek Q1, Q2, Q3, Q podczas sprawdzania przedstawionego układu po podaniu stanów wysokich na wejścia A i B?

To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Do zobrazowania relacji między elementami i zespołami projektowanej maszyny wykorzystuje się rysunek
Do sterownika PLC załadowano program:
0 LD I0.0 1 XOR I0.1 2 A I0.2 3 = Q0.0
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Na którym schemacie pokazane jest poprawne podłączenie trójprzewodowego czujnika z wyjściem analogowym prądowym 0÷20 mA do sterownika, jeśli sterownik posiada wejście analogowe napięciowe 0÷10V?

To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Podczas diagnostyki systemu mechatronicznego, co jest kluczowym parametrem do zmierzenia?
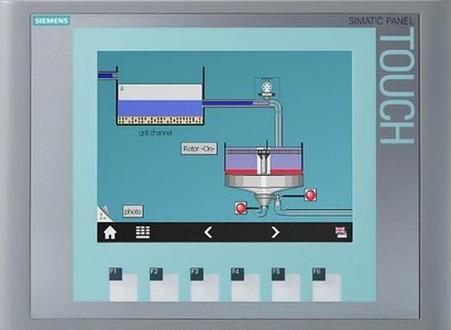
Urządzenie przedstawione na ilustracji, w projektowanym systemie mechatronicznym, będzie mogło pełnić funkcję
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.