Pytanie 1
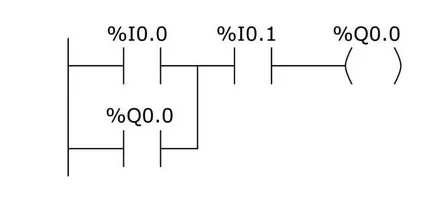
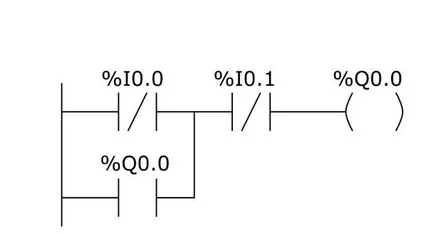
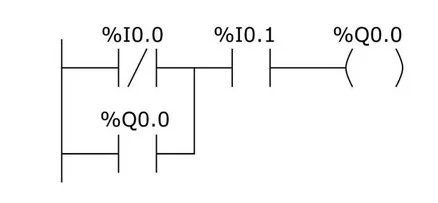
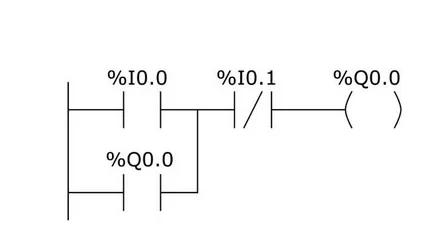
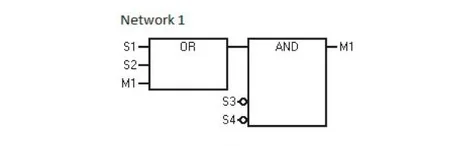
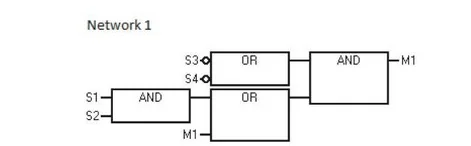
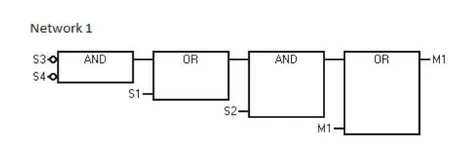
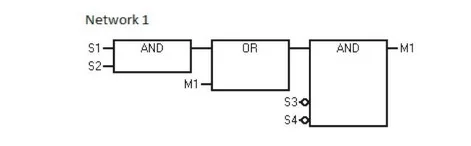
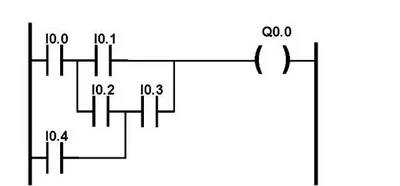
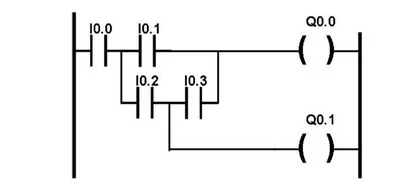
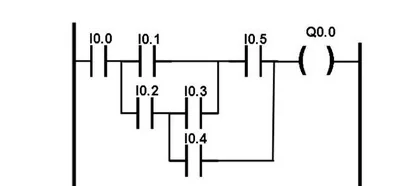
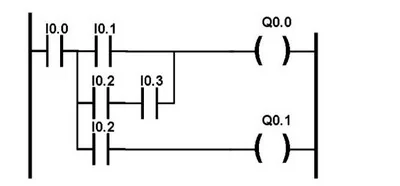
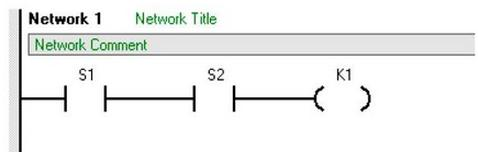
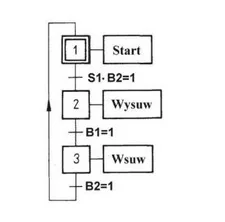
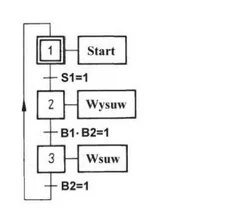
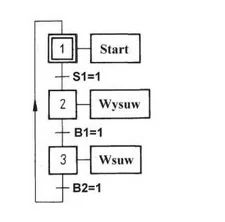
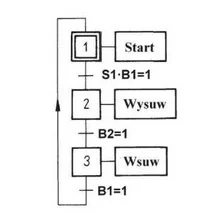
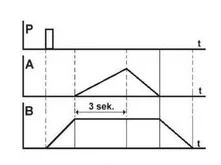
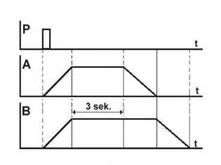
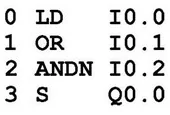
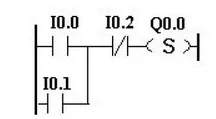
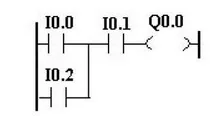
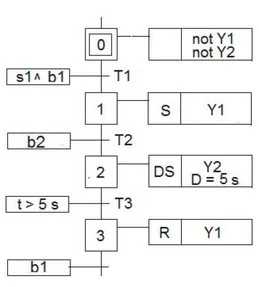
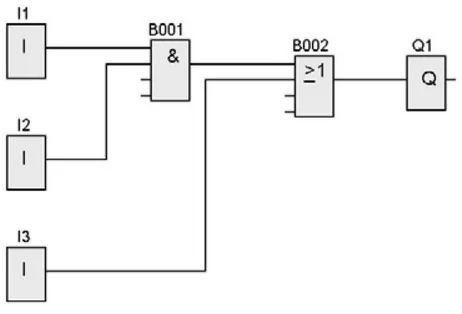
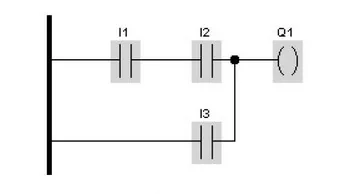
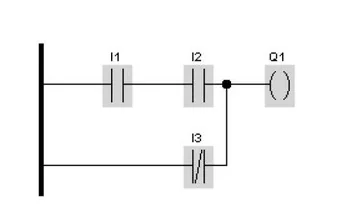
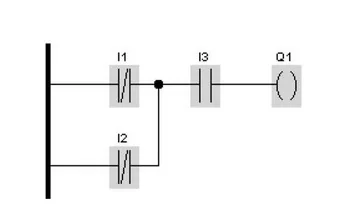
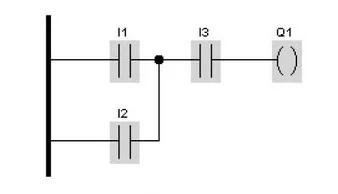
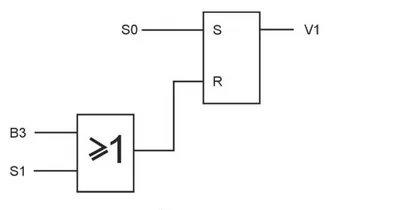
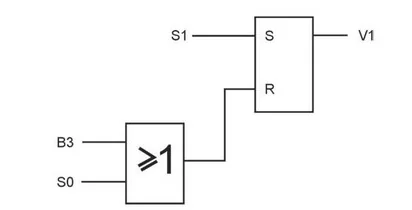
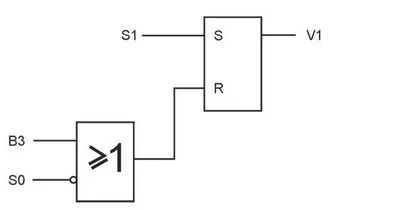
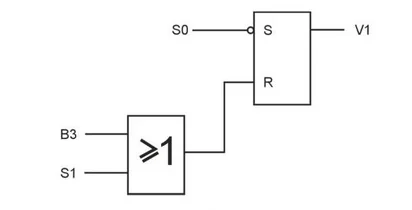
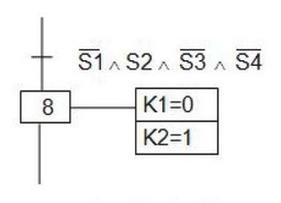
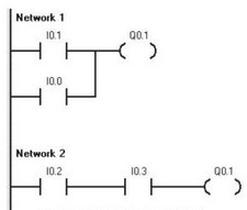
Stycznik K1 silnika M1 mieszadła załączony jest wtedy, gdy wciśnięty jest przycisk S1 START rozpoczynający proces wyrobu masy plastycznej, gdy czujnik poziomu B1 jest aktywny, natomiast przycisk S2 STOP jest w pozycji niewciśniętej. Który schemat blokowy przedstawia opisany proces?
A. D.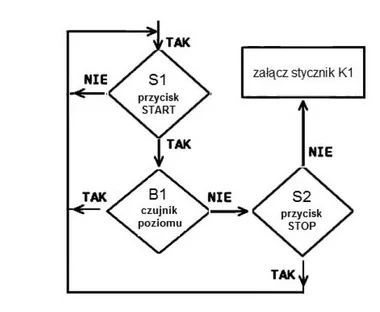
B. A.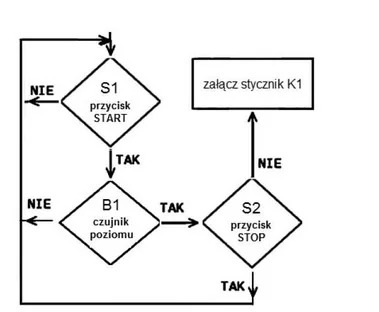
C. C.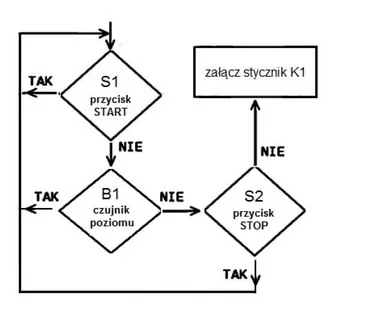
D. B.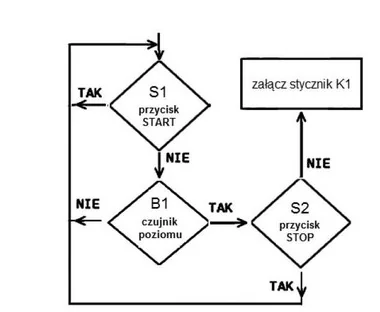
Brak odpowiedzi na to pytanie.
Wyjaśnienie poprawnej odpowiedzi:
Wybranie schematu A jako poprawnego jest zasadne, ponieważ dokładnie odzwierciedla opisany proces sterowania silnikiem M1 mieszadła. W procesach automatyzacji przemysłowej kluczowe jest zrozumienie, że załączenie stycznika K1 następuje tylko w spełnieniu wszystkich trzech warunków: wciśnięty przycisk S1 START, aktywny czujnik poziomu B1 oraz niewciśnięty przycisk S2 STOP. Taki schemat blokowy jest zgodny z zasadami logiki programowalnych kontrolerów, które często wykorzystują schematy AND do opisu warunków, w których urządzenie powinno być aktywne. W praktyce, taka logika jest niezbędna do zapewnienia bezpieczeństwa i efektywności operacji, ponieważ zapobiega to niepożądanym awariom. Na przykład w systemach automatyki, jeśli czujnik poziomu jest nieaktywny, a silnik zostanie przypadkowo uruchomiony, może to prowadzić do poważnych uszkodzeń instalacji. Schemat A, jako jedyny, uwzględnia te aspekty, co czyni go najlepszym rozwiązaniem.
Wybranie schematu A jako poprawnego jest zasadne, ponieważ dokładnie odzwierciedla opisany proces sterowania silnikiem M1 mieszadła. W procesach automatyzacji przemysłowej kluczowe jest zrozumienie, że załączenie stycznika K1 następuje tylko w spełnieniu wszystkich trzech warunków: wciśnięty przycisk S1 START, aktywny czujnik poziomu B1 oraz niewciśnięty przycisk S2 STOP. Taki schemat blokowy jest zgodny z zasadami logiki programowalnych kontrolerów, które często wykorzystują schematy AND do opisu warunków, w których urządzenie powinno być aktywne. W praktyce, taka logika jest niezbędna do zapewnienia bezpieczeństwa i efektywności operacji, ponieważ zapobiega to niepożądanym awariom. Na przykład w systemach automatyki, jeśli czujnik poziomu jest nieaktywny, a silnik zostanie przypadkowo uruchomiony, może to prowadzić do poważnych uszkodzeń instalacji. Schemat A, jako jedyny, uwzględnia te aspekty, co czyni go najlepszym rozwiązaniem.