Pytanie 1
Wskaż opis, który jest zgodny ze schematem.
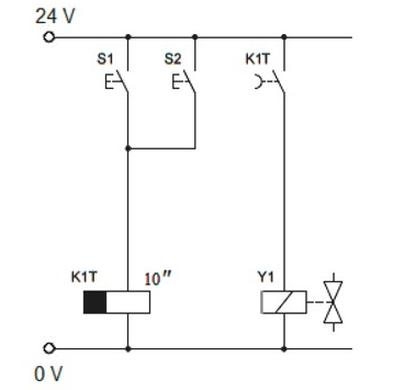
A. Cewka Y1 zostanie załączona po naciśnięciu któregokolwiek z przycisków SI1 i S2 i wyłączona po 10 s od zwolnienia jednego z przycisków.
B. Cewka Y1 zostanie załączona po naciśnięciu któregokolwiek z przycisków S1 i S2 i wyłączona po 10 s od zwolnienia obu przycisków.
C. Cewka Y1 zostanie załączona po 10 s od naciśnięcia któregokolwiek z przycisków S1 i S2 i wyłączona od razu po zwolnieniu obu przycisków.
D. Cewka Y1 zostanie załączona po 10 s od naciśnięcia któregokolwiek z przycisków S1 i S2 i wyłączona od razu po zwolnieniu jednego z przycisków.
Patrząc na inne odpowiedzi, widzę, że sporo z nich ma spore błędy w rozumieniu, jak działa cewka Y1. Niektóre odpowiedzi mówią, że cewka Y1 wyłącza się od razu po puszczeniu przycisku, co jest totalnie błędne, bo w układzie równoległym to tak nie działa. Przyciski S1 i S2 działają jak dwa źródła sygnału, które uruchamiają cewkę K1T. Kiedy naciśniesz jeden z nich, to K1T działa niezależnie od tego, co się dzieje z drugim przyciskiem. Z kolei błędne jest stwierdzenie, że cewka Y1 ma być wyłączona od razu po zwolnieniu jednego z przycisków. Właściwie, Y1 zostaje aktywna przez 10 sekund po zwolnieniu obu, co jest naprawdę istotne w automatyce. Nie zrozumienie, jak działają przekaźniki czasowe oraz połączenia równoległe, prowadzi do błędnych wniosków, co może skutkować nieodpowiednią konfiguracją obwodów. A to z kolei może zagrażać bezpieczeństwu i działaniu systemów. Dlatego tak ważne jest, żeby dokładnie rozumieć, jak działają te elementy, żeby uniknąć pomyłek.