Pytanie 1
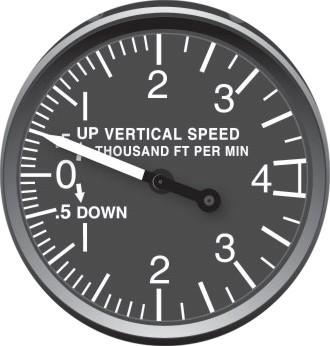
Przed wykonaniem pomiaru wskazówka omomierza szeregowego zajmowała położenie przedstawione na rysunku. Oznacza to

A. przeciążenie przyrządu.
B. stan niezdatności przyrządu.
C. przypadkowe położenie wskazówki.
D. stan zdatności przyrządu.
Stan zdatności omomierza, który odzwierciedla wskazówka znajdująca się na symbolu omegi (Ω), jest kluczowy dla prawidłowego przeprowadzania pomiarów rezystancji. Wskazówka znajdująca się na końcu skali oznacza, że urządzenie zostało wcześniej wyzerowane i jest gotowe do pracy. W praktyce, przed każdym pomiarem należy upewnić się, że omomierz jest w stanie zdatności, co jest zgodne z zasadami dobrych praktyk w elektrotechnice. W przypadku pomiarów rezystancji, omomierz powinien wskazywać zero, co wskazuje na brak przepływu prądu. Tylko w takiej chwili można zrealizować rzetelny pomiar, unikając wpływu błędów, takich jak przeciążenia czy uszkodzenia sprzętu. Używanie omomierza w stanie gotowości jest niezbędne do zapewnienia bezpieczeństwa oraz dokładności pomiarów, co jest kluczowe w technice i inżynierii elektrycznej. Warto również zwrócić uwagę na regularne kalibracje urządzenia oraz przestrzeganie procedur, aby zapewnić jego długotrwałą niezawodność.