Pytanie 1
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wynik: 23/40 punktów (57,5%)
Wymagane minimum: 20 punktów (50%)
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Maksymalne napięcie na analogowym wejściu kontrolera PLC wynosi 10 V DC, a rozdzielczość tego wejścia, wynosząca około 40 mV, zapewnia zastosowanie kontrolera PLC z przetwornikiem A/C.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wzmacniacz charakteryzuje się pasmem przepustowym wynoszącym w = 12 750 Hz oraz częstotliwością górną fg= 13 500 Hz. Jaką minimalną wartość częstotliwości fd w zakresie przenoszenia sygnałów należy osiągnąć, aby były one wzmacniane?
Z tabeli wynika, że orientacyjna siła siłownika o średnicy tłoka 12 mm, tłoczyska 6 mm, przy ciśnieniu roboczym 4 bar uzyskiwana podczas powrotu wynosi
| Orientacyjna siła uzyskana na siłowniku w zależności od zadanego ciśnienia | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Średnica tłoka | Średnica tłoczyska | Powierzchnia pracy mm² | Ciśnienie robocze (bar) | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| siła w N | ||||||||||||
| ø12 | ø6 | wysuw = 113 | 11 | 23 | 34 | 45 | 57 | 68 | 79 | 90 | 102 | 113 |
| powrót = 85 | 8 | 17 | 25 | 34 | 42 | 51 | 59 | 68 | 76 | 85 | ||
| ø16 | ø8 | wysuw = 201 | 20 | 40 | 60 | 80 | 100 | 121 | 141 | 161 | 181 | 201 |
| powrót = 151 | 15 | 30 | 45 | 60 | 75 | 90 | 106 | 121 | 136 | 151 | ||
| ø20 | ø10 | wysuw = 314 | 31 | 63 | 94 | 126 | 157 | 188 | 220 | 251 | 283 | 314 |
| powrót = 236 | 24 | 47 | 71 | 94 | 118 | 141 | 165 | 189 | 212 | 236 | ||
| ø25 | ø10 | wysuw = 491 | 49 | 98 | 147 | 196 | 245 | 295 | 344 | 393 | 442 | 491 |
| powrót = 412 | 41 | 82 | 124 | 165 | 206 | 247 | 289 | 330 | 371 | 412 | ||
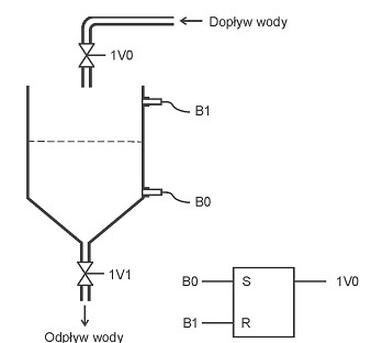
Otwarcie zaworu 1V0 dopływu wody do zbiornika następuje po wygenerowaniu przez czujnik B0 sygnału o wartości 0, a zamknięcie po wygenerowaniu przez czujnik B1 sygnału o wartości 1. Sterowanie zrealizowane przy pomocy przerzutnika RS działa niepoprawnie. Należy
Który z programów przekształca kod napisany w danym języku programowania na kod maszynowy stosowany przez mikrokontroler?
Na rysunku przedstawiono wygląd zewnętrzny czujnika i odpowiadający mu symbol graficzny. Jaki to czujnik?

Rozpoczęcie demontażu elektrozaworu w systemie elektropneumatycznym wymaga najpierw odłączenia
Elektrozawór typu normalnie zamknięty o parametrach 230V AC, 50Hz, DN 3/8" FAF 61 mm, nie aktywuje się po podaniu napięcia znamionowego. Przystępując do serwisu elektrozaworu, trzeba najpierw wyłączyć napięcie zasilające, a następnie, w pierwszej kolejności
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
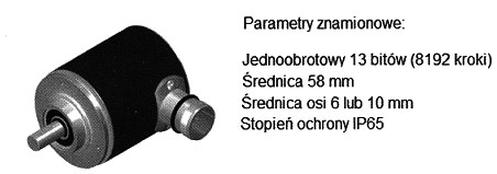
Enkoder absolutny jednoobrotowy, o podanych parametrach, służy do
W zakładzie produkcyjnym ustalono, że ciśnienie względne powietrza w zbiorniku wynosi +3 bary. Co oznacza, że nadciśnienie pNAD oraz ciśnienie absolutne (bezwzględne) pABS mają wartości:
Siłownik hydrauliczny o parametrach znamionowych zamieszczonych w tabeli, w warunkach nominalnych zasilany jest czynnikiem roboczym o ciśnieniu
| Parametry siłownika hydraulicznego | |
|---|---|
| Tłok | Ø 25 mm ÷ Ø 500 mm |
| Tłoczysko | Ø 16 mm ÷ Ø 250 mm |
| Skok | do 5000 mm |
| Ciśnienie nominalne | Pn = 35 MPa (350 bar) |
| Ciśnienie próbne | Pp = 1,5 x Pn |
| Prędkość przesuwu tłoka | Vmax = 0,5 m/s |
| Temperatura czynnika roboczego | -25°C ÷ +200°C (248 K ÷ 473 K) |
| Temperatura otoczenia | -20°C ÷ +100°C (253 K ÷ 373 K) |
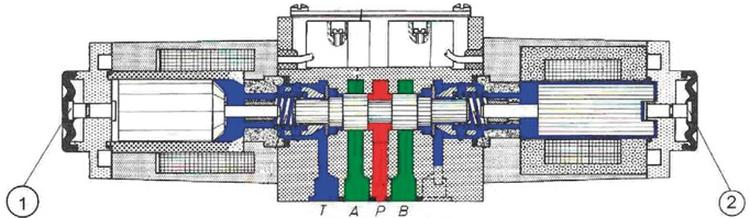
Które elementy hydraulicznego zaworu rozdzielającego 4/3 oznaczone są na rysunku cyframi 1 i 2?
Podaj kolejność działań prowadzących do demontażu siłownika dwustronnego działania z układu pneumatycznego, który jest sterowany elektrozaworem 5/2 oraz posiada dwa czujniki kontaktronowe zamontowane na cylindrze.
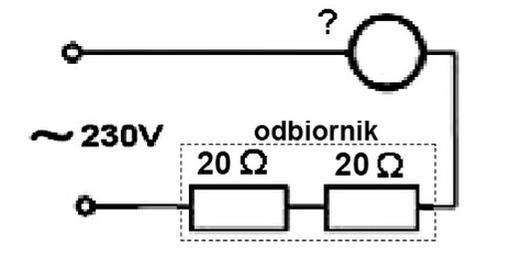
Jak należy nastawić amperomierz, aby zmierzyć prąd w układzie pokazanym na rysunku?
Podczas wymiany przewodu wysokociśnieniowego w systemie hydraulicznym, jakie aspekty powinny być brane pod uwagę przy wyborze nowego przewodu?
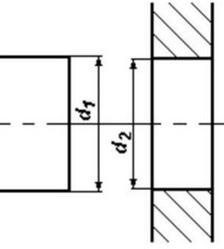
Na rysunku przedstawione zostały fragmenty dwóch elementów, które należy połączyć techniką połączenia wciskowego wtłaczanego. Jaka powinna być zależność pomiędzy wymiarami d1 i d2?
Z wymienionych materiałów wybierz ten, który jest najczęściej używany w produkcji łożysk ślizgowych?
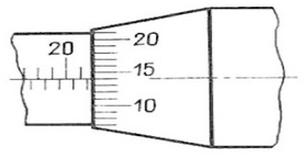
Na podstawie wskazania mikrometru wynik pomiaru wynosi
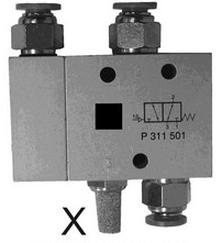
Który element został oznaczony na rysunku symbolem literowym X?
W jaki sposób można zamocować przedstawiony na rysunku stycznik?

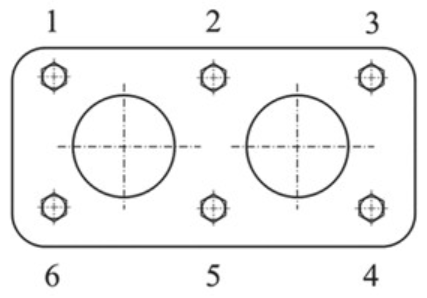
Określ prawidłową kolejność dokręcania śrub lub nakrętek części podzespołu, przedstawionej na rysunku.
Na którym rysunku przedstawiono szkic przekroju prawidłowo zaciśniętej końcówki przewodu w obszarze z izolacją?

Rurka Bourdona stanowi część
Który z podanych elementów przedstawiono na rysunku?

To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jaką wartość można zarejestrować korzystając z enkodera absolutnego jednoobrotowego?
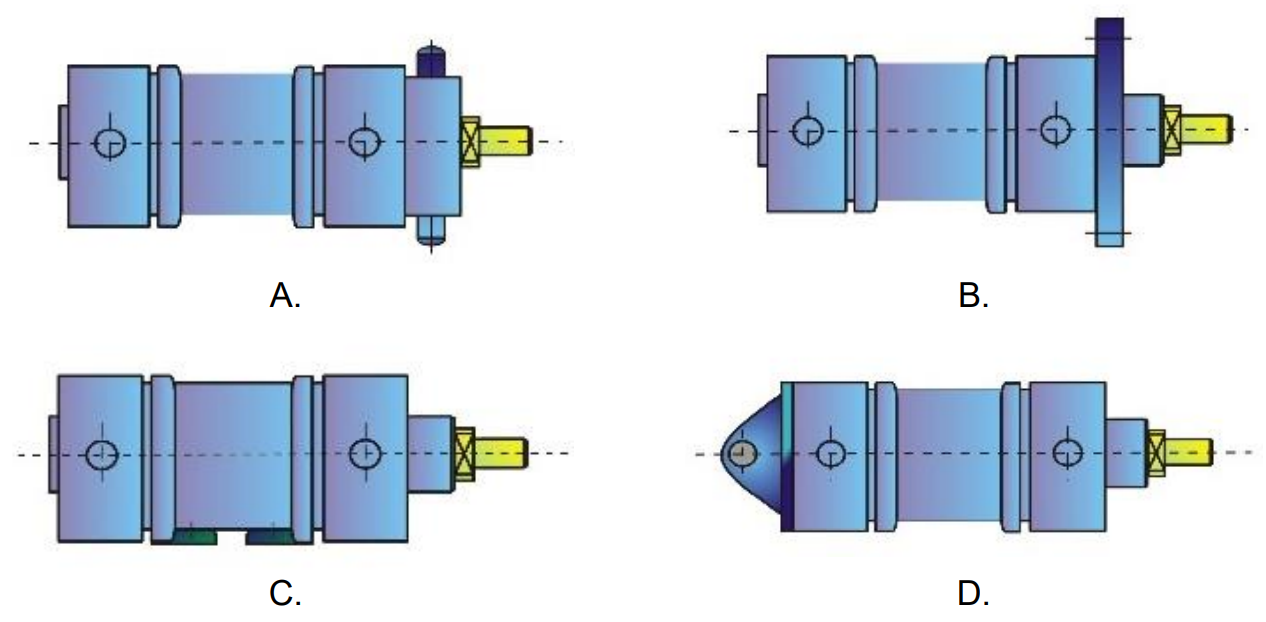
Na którym rysunku przedstawiono mocowanie kołnierzowe siłowników pneumatycznych?
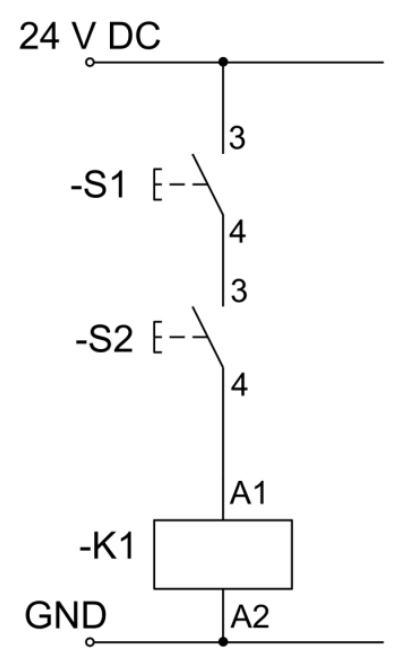
Zadziałanie cewki przekaźnika K1 określone jest przez funkcję
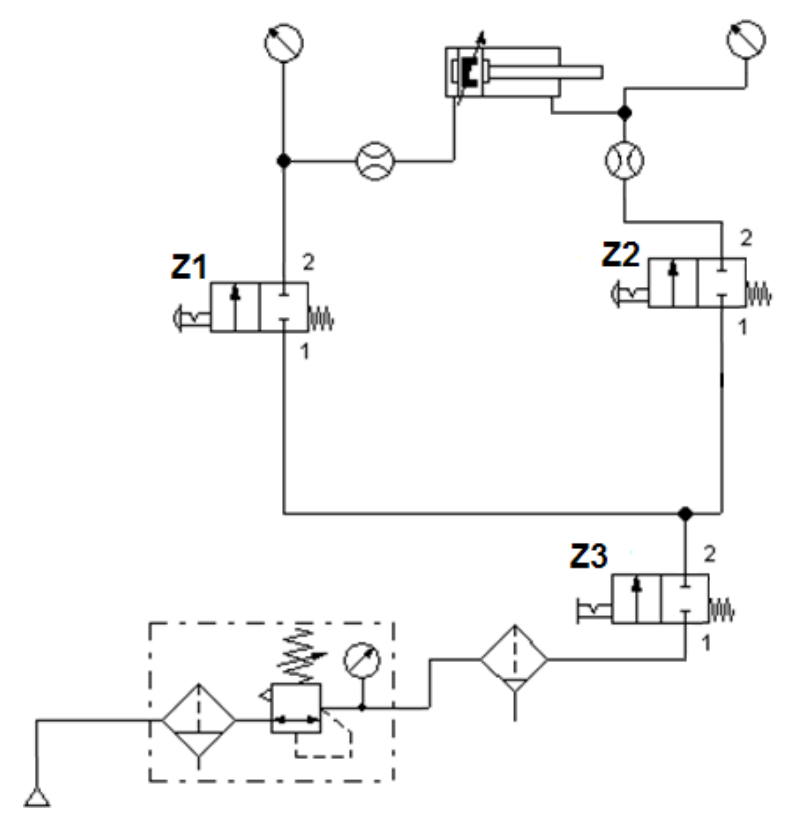
Który podzespół jest badany pod względem szczelności w układzie przedstawionym na ilustracji?
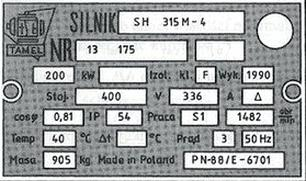
Do jakiego rodzaju pracy przystosowany jest silnik indukcyjny, którego tabliczkę znamionową przedstawiono na rysunku?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Konserwacja układu stycznikowo-przekaźnikowego nie obejmuje
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
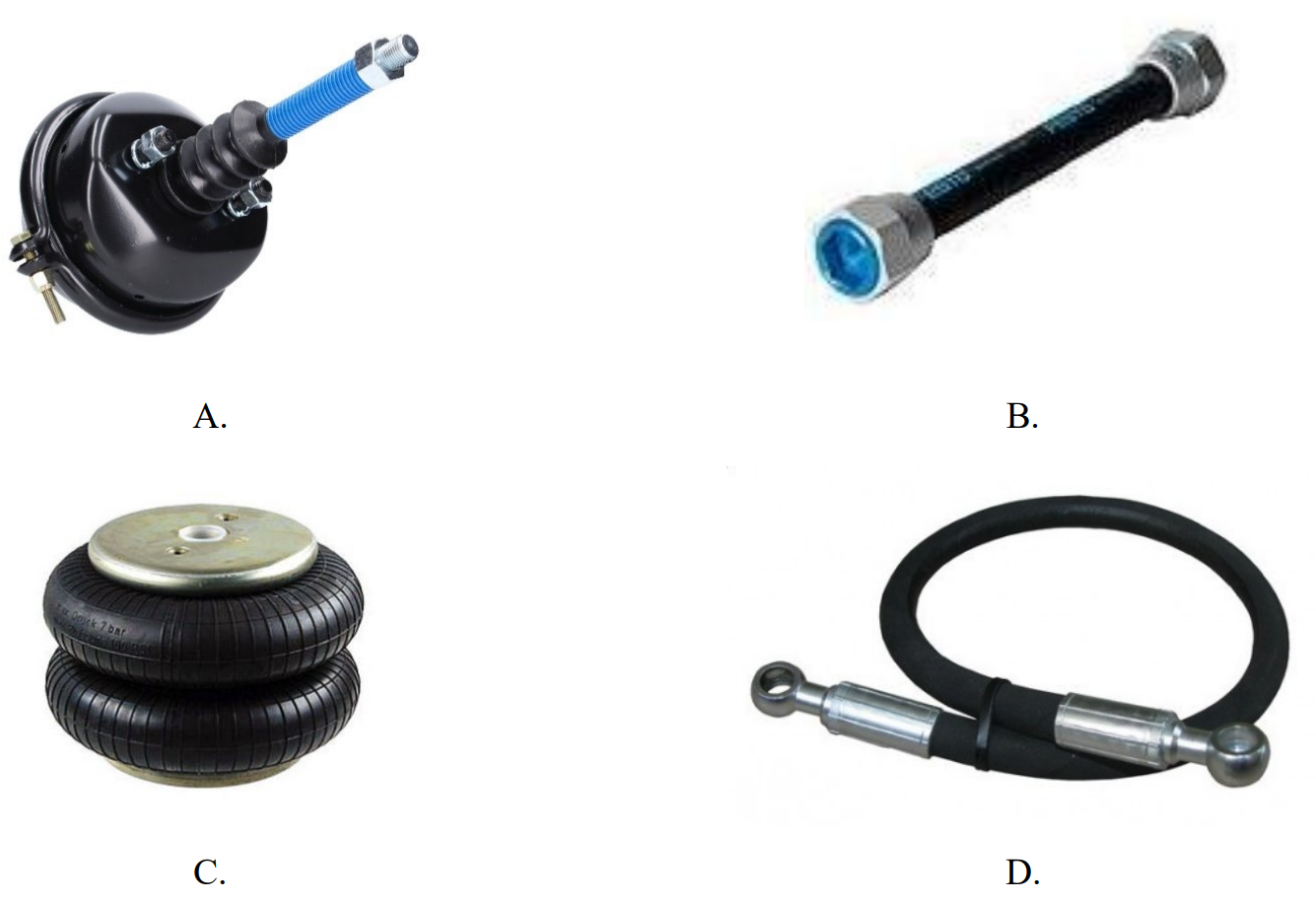
Na którym rysunku przedstawiono muskuł pneumatyczny?
Na podstawie przedstawionych danych katalogowych sprężarek określ, który model sprężarki należy zastosować do zasilania układu pneumatycznego, w którym ciśnienie robocze wynosi 6 bar, a maksymalne natężenie przepływu czynnika roboczego ma wartość 4 dm³/s.
Dane katalogowe sprężarek
| 50Hz | R2.2IU-10-200 | R41IU-10-200 | R41IU-10-200SD | R5.5IU-10-200 |
|---|---|---|---|---|
| SPRĘŻARKA | 2.2 | 4.0 | 4.0 | 5.5 |
| Maksymalna ciśnienie robocze bar (psi) | 10 (145) | 10 (145) | 10 (145) | 10 (145) |
| Fabrycznie ustawiony reload ciśnienia bar (psi) | 10.5 (152) | 10.5 (152) | 10.5 (152) | 10.5 (152) |
| Natężenie przepływu m³/min (cfm) | 0.241 (8.5) | 0.467 (16.5) | 0.467 (16.5) | 0.660 (22.0) |
| Wartość wyzwalająca temperatury tłoczenia sprężarki | 228°C (109°F) | |||
| Temperatura otoczenia (min.)→ (max.) | +2°C (+36°F) → + 46°F(115°F) | |||
| SILNIK | ||||
| Obudowa silnika | TEFC (IP55) | |||
| Moc nominalna | 2.2KW | 4.0 KW | 4.0 KW | 5.5 KW |
| Szybkość (obr./min) | 2870 RPM | 2875 RPM | 2875 RPM | 2860 RPM |
| Klasa izolacyjności | F | |||
| Poziom głośności (dBA) | 64 | 64 | 64 | 67 |
| DANE OGÓLNE | ||||
| Resztkowa zawartość płynu chłodzącego | 3 ppm (3mg/m³) | |||
| Pojemność zbiornika odolejacza | 5.16 litres | |||
| Objętość płynu chłodzącego | 2.5 litres | |||
| Masa – 200 litr Odbiornik montowany | 174 | 183 | 183 | 188 |
| Masa – z suszarką | 218 | 227 | 227 | 232 |
| PARAMETRY ELEKTRYCZNE - 400V | ||||
| MODEL | 2.2IU | R41U | R41U-SD | R5.5U |
| Prąd przy pełnym obciążeniu (maksimum) | 6.5 A | 10.5 A | 10.5 A | 14 A |
| Prąd rozruchowy | 38.5 A | 66.5 A | 36.7 A | 49 A |
| Czas rozruchu DOL (układ gwiazda-trójkąt) | 3-5 sec (7-10 sec) | |||
| Liczba rozruchów na godzinę (maksymalnie)) | 20 | |||
| Napięcie sterowania | 110 vac | |||
| Zalecane dopuszczalne obciążenie bezpiecznika (patrz uwaga 1) | 10 | 20 | 20 | 25 |
| Zalecany przekrój przewodu AWG (patrz uwaga 2) | 1 | 1.5 | 1.5 | 2.5 |