Pytanie 1
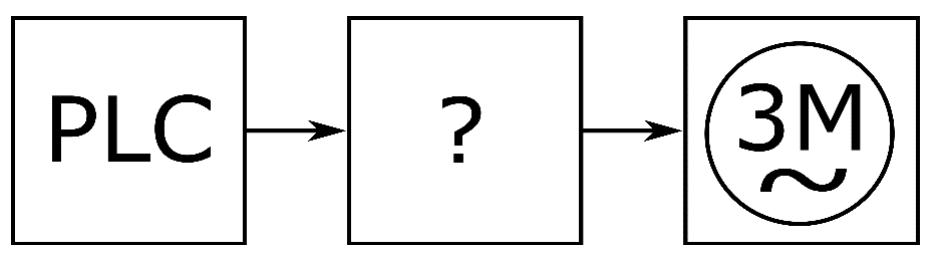
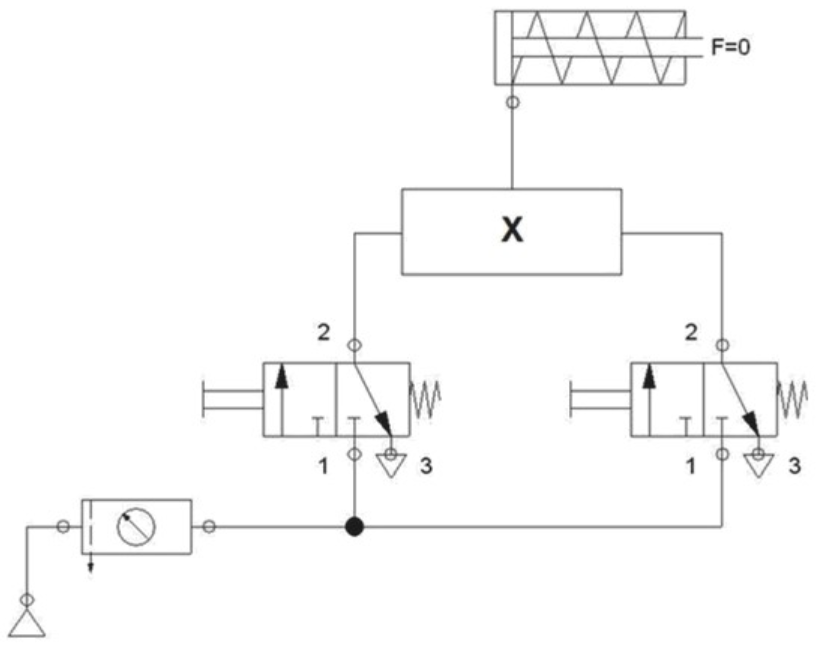
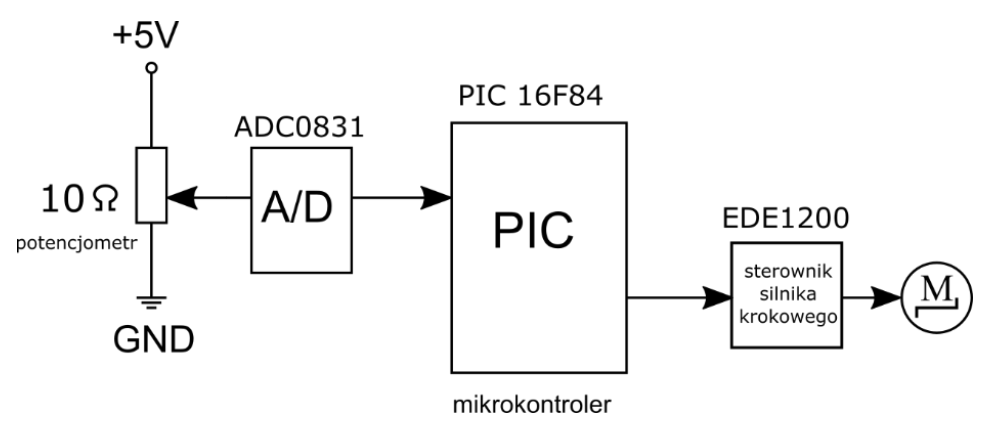
Ile minimalnie 8 bitowych portów we/wy powinien posiadać mikrokontroler PIC wyposażony w szeregowy
8-bitowy przetwornik analogowo-cyfrowy oznaczony ADC0831, aby można było zrealizować układ mechatroniczny przedstawiony na rysunku?
A. 5 portów.
B. 4 porty.
C. 2 porty.
D. 3 porty.
Brak odpowiedzi na to pytanie.
Wyjaśnienie poprawnej odpowiedzi:
Odpowiedź, że mikrokontroler PIC powinien mieć minimum 2 porty we/wy, jest prawidłowa z uwagi na sposób komunikacji z przetwornikiem analogowo-cyfrowym ADC0831 oraz wymagania dotyczące sterowania silnikiem krokowym. Przetwornik ADC0831 wykorzystuje szeregowy interfejs komunikacyjny, co pozwala na przesyłanie danych za pomocą jednego portu. Dokładniej, jeden port wejściowy jest wymagany do odbioru 8-bitowej informacji analogowej przetworzonej na sygnał cyfrowy. Z drugiej strony, do sterowania silnikiem krokowym EDE1200 potrzebny jest przynajmniej jeden port wyjściowy, który będzie odpowiedzialny za przekazywanie sygnałów sterujących, takich jak kierunek oraz impulsy krokowe. W praktyce, wiele systemów mechatronicznych stosuje minimalizację liczby portów, co jest zgodne z dobrą praktyką inżynieryjną, aby uprościć projekt oraz zmniejszyć koszty produkcji. Dzięki temu, odpowiedź sugerująca 2 porty we/wy stanowi optymalne rozwiązanie, które spełnia wymagania funkcjonalne układu, jednocześnie pozwalając na efektywne zarządzanie zasobami mikrokontrolera.
Odpowiedź, że mikrokontroler PIC powinien mieć minimum 2 porty we/wy, jest prawidłowa z uwagi na sposób komunikacji z przetwornikiem analogowo-cyfrowym ADC0831 oraz wymagania dotyczące sterowania silnikiem krokowym. Przetwornik ADC0831 wykorzystuje szeregowy interfejs komunikacyjny, co pozwala na przesyłanie danych za pomocą jednego portu. Dokładniej, jeden port wejściowy jest wymagany do odbioru 8-bitowej informacji analogowej przetworzonej na sygnał cyfrowy. Z drugiej strony, do sterowania silnikiem krokowym EDE1200 potrzebny jest przynajmniej jeden port wyjściowy, który będzie odpowiedzialny za przekazywanie sygnałów sterujących, takich jak kierunek oraz impulsy krokowe. W praktyce, wiele systemów mechatronicznych stosuje minimalizację liczby portów, co jest zgodne z dobrą praktyką inżynieryjną, aby uprościć projekt oraz zmniejszyć koszty produkcji. Dzięki temu, odpowiedź sugerująca 2 porty we/wy stanowi optymalne rozwiązanie, które spełnia wymagania funkcjonalne układu, jednocześnie pozwalając na efektywne zarządzanie zasobami mikrokontrolera.