Pytanie 1
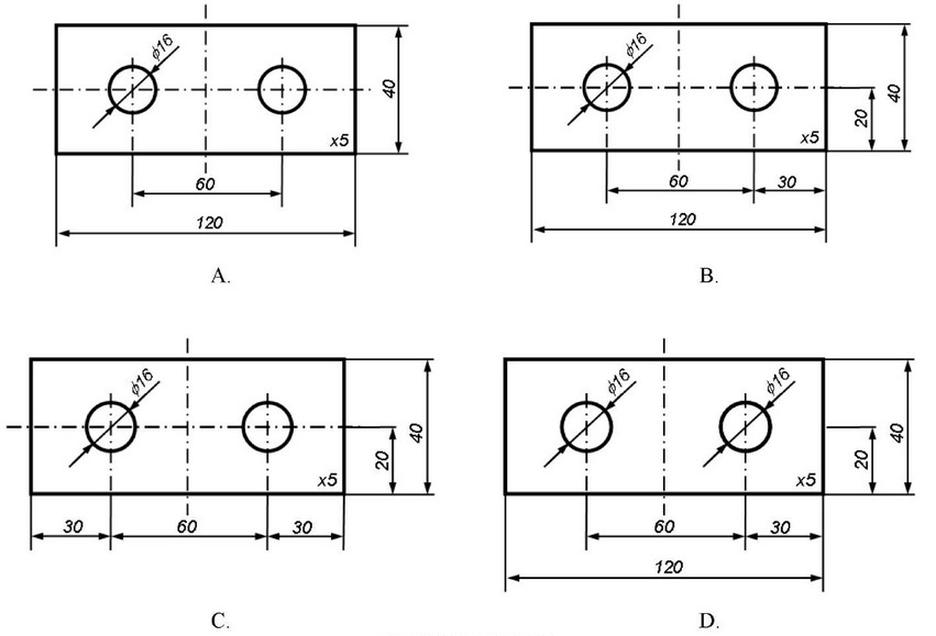
Na którym rysunku przedstawiono prawidłowo zwymiarowany detal?
A. D.
B. B.
C. A.
D. C.
Rysunek A przedstawia prawidłowo zwymiarowany detal, co jest kluczowe w praktyce inżynierskiej i projektowej. Wymiary zewnętrzne umieszczone są na zewnątrz obiektu, co zwiększa przejrzystość rysunku, a wymiary wewnętrzne zaznaczone są w odpowiednich miejscach, umożliwiając łatwe ich odczytanie. Poprawne wymiarowanie zgodne jest z normą ISO 129, która nakłada szczegółowe zasady dotyczące prezentowania wymiarów. Dodatkowo, suma wymiarów wewnętrznych oraz zewnętrznych jest zgodna, co jest istotne dla zachowania integralności projektu. Przykładowo, jeśli projektant pracuje nad konstrukcją mechaniczną, konieczne jest, aby wszystkie wymiary były zgodne, aby uniknąć problemów podczas produkcji i montażu. Prawidłowe zwymiarowanie wpływa także na kosztorysowanie oraz na czas realizacji projektu, ponieważ jednoznaczne wymiary zmniejszają ryzyko pomyłek.