Pytanie 1
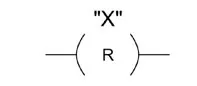
Którego symbolu należy użyć na schemacie elektrycznym w celu przedstawienia cewki przekaźnika czasowego z opóźnionym wyłączaniem?

A. D.
B. C.
C. B.
D. A.
W przypadku odpowiedzi, które nie wskazują na symbol B, można zauważyć kilka typowych błędów poznawczych. Wiele osób mylnie identyfikuje cewki jako standardowe elementy obwodów, nie dostrzegając, że przekaźnik czasowy posiada dodatkowe funkcje, które wymagają specyficznej reprezentacji graficznej. Często zdarza się, że osoby odpowiadające na pytania tego typu nie zwracają uwagi na dodatkowe symbole, które mogą odzwierciedlać złożoność urządzenia. Niektórzy mogą mylić cewki przekaźników z innymi komponentami, takimi jak zwykłe przełączniki czy styczniki, które mają zupełnie inną funkcję i zastosowanie w obwodach elektrycznych. To prowadzi do nieporozumień, ponieważ schematy elektryczne są znormalizowane, a każdy symbol ma swoje konkretne znaczenie. Dlatego ważne jest, aby znać różnice pomiędzy symbolami oraz zrozumieć, jakie właściwości i funkcje reprezentują. Stosowanie niewłaściwych symboli w schematach elektrycznych nie tylko prowadzi do błędnych interpretacji, ale również może przyczynić się do poważnych problemów w działaniu układów elektrycznych. Kiedy projektuje się systemy automatyki, niemożność prawidłowego odczytania symboli może skutkować awariami, które mogą być kosztowne w naprawie i prowadzić do nieprzewidzianych przestojów w pracy urządzeń.