Pytanie 1
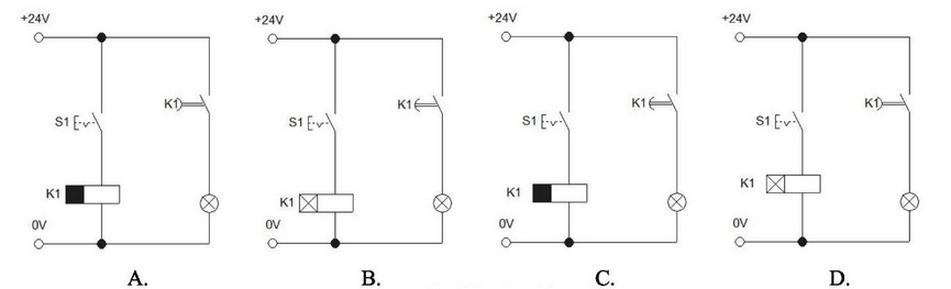
Wskaż miejsce, w którym należy umieścić czujnik indukcyjny, który będzie aktywny, gdy ferromagnetyczne tłoczysko siłownika będzie całkowicie wysunięte.
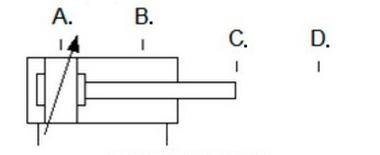
A. C.
B. B.
C. A.
D. D.
Czujnik indukcyjny umieszczony w punkcie oznaczonym jako 'D.' jest w stanie skutecznie wykrywać obecność ferromagnetycznego tłoczyska siłownika, gdy jest ono całkowicie wysunięte. Wykorzystanie czujnika indukcyjnego w tym kontekście jest zgodne z zasadami automatyki przemysłowej, gdzie precyzyjne wykrywanie położenia elementów ruchomych jest kluczowe dla poprawnej pracy systemów sterowania. Przykładem zastosowania czujników indukcyjnych są aplikacje w systemach automatyzacji, gdzie monitorowanie pozycji tłoczysk w siłownikach pneumatycznych lub hydraulicznych jest niezbędne do utrzymania bezpieczeństwa i efektywności procesu. Umiejscowienie czujnika w odpowiedniej lokalizacji pozwala na wczesne wykrywanie, gdy tłoczysko osiąga maksimum swojego wysunięcia, co może uruchamiać procesy, takie jak zatrzymanie maszyny lub włączenie innego elementu systemu. Tego rodzaju podejście jest zgodne z najlepszymi praktykami branżowymi, w tym normami IEC 61496 dla bezpieczeństwa w automatyzacji.