Pytanie 1
W jaki sposób, w zależności od wartości napięcia międzyfazowego sieci U i częstotliwości f, należy skojarzyć uzwojenie silnika przed podłączeniem go do sieci trójfazowej?
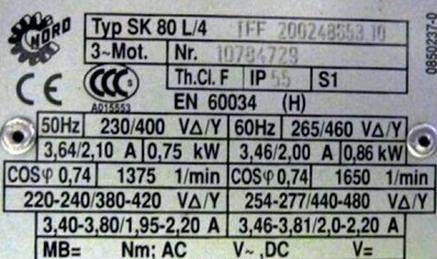
A. Jeżeli U = 400 V, f= 50 Hz w Y, jeżeli U =265 V, f=60 Hz w A
B. Jeżeli U = 230 V, f= 50 Hz w A, jeżeli U = 265 V, f=60 Hz w Y
C. Jeżeli U = 400 V, f= 50 Hz w A, jeżeli U =460 V, f=60 Hz w Y
D. Jeżeli U = 400 V, f= 50 Hz w Y, jeżeli U =460 V, f=60 Hz w Δ
Wybór niewłaściwej konfiguracji uzwojeń silnika może prowadzić do wielu problemów związanych z jego działaniem. Niepoprawne połączenie uzwojeń w przypadku napięcia 400 V i częstotliwości 50 Hz, sugerujące połączenie w trójkąt (Δ), jest nieodpowiednie, ponieważ w takim przypadku napięcie na uzwojeniach przekroczy wartości dopuszczalne dla silnika, co może prowadzić do jego przegrzania i uszkodzenia. Użycie niewłaściwej wartości napięcia w połączeniu z częstotliwością 60 Hz, jak w przypadku 265 V w konfiguracji gwiazdy, również jest błędne, ponieważ trójkąt nie jest w tym przypadku odpowiedni. Wielu techników popełnia błąd, zakładając, że połączenie w trójkąt zawsze jest korzystne dla silników, co jest nieprawidłowe. Kluczowym aspektem jest zrozumienie, że różne połączenia wpływają na charakterystykę pracy silnika, a ich dobór powinien być oparty na analizie parametrów zasilania. Stosowanie nieodpowiednich uzwojeń w kontekście zasilania może prowadzić do nieefektywności energetycznej oraz zwiększonego ryzyka awarii. W praktyce, każdy silnik powinien być podłączony zgodnie z jego normami i wymaganiami, co jest kluczowe nie tylko dla jego efektywności, ale również dla bezpieczeństwa użytkowania w złożonych systemach automatyki przemysłowej. Ostatecznie, stosowanie się do standardów branżowych, takich jak PN-EN 60034-1, jest niezbędne do zapewnienia długotrwałej i niezawodnej pracy maszyn elektrycznych.