Pytanie 1
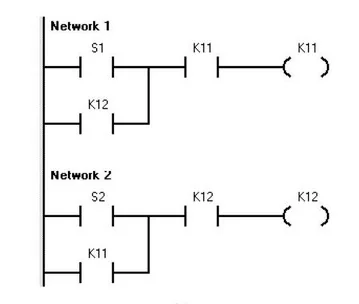
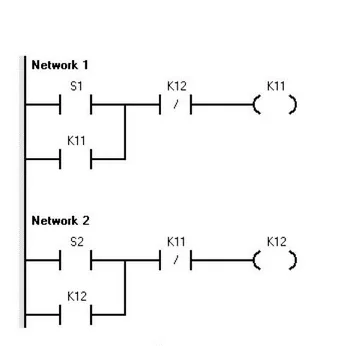
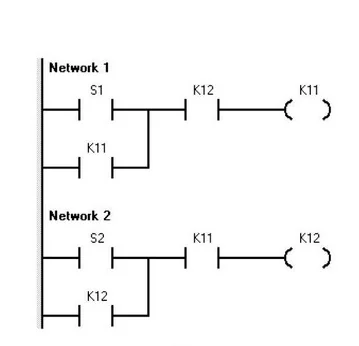
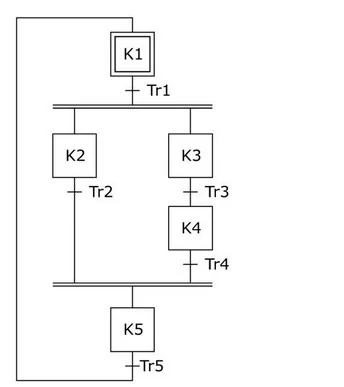
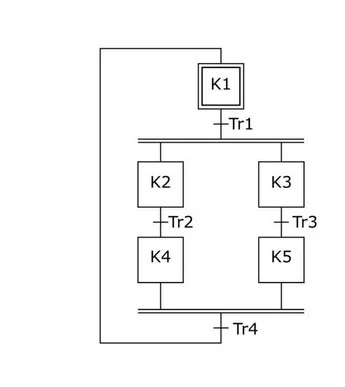
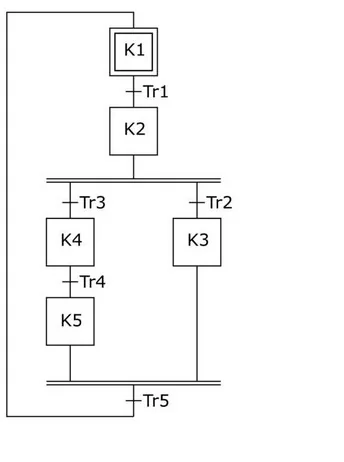
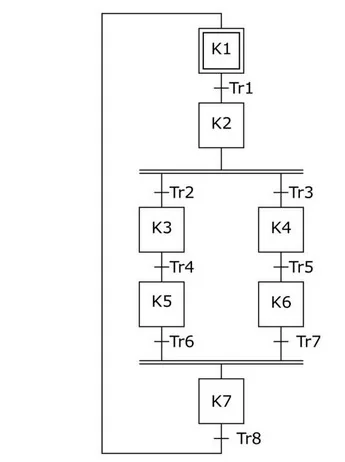
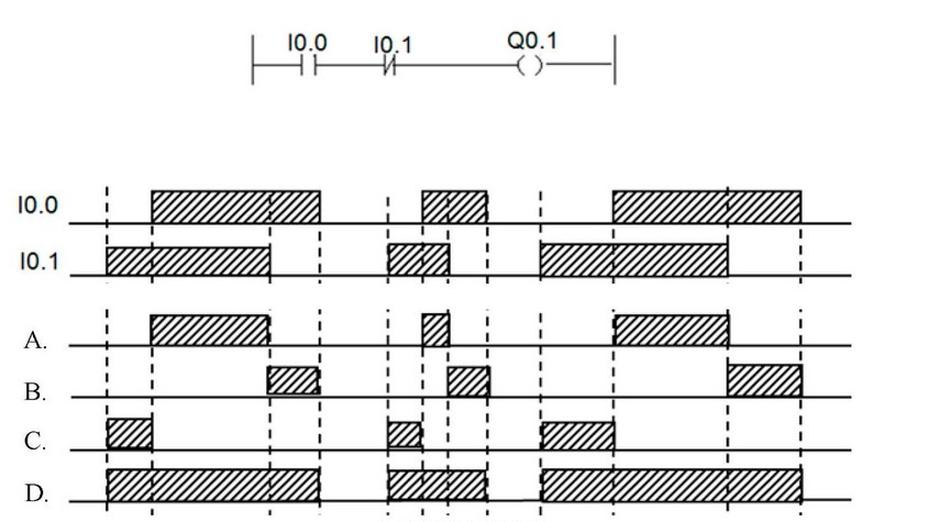
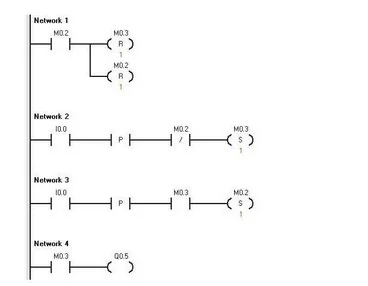
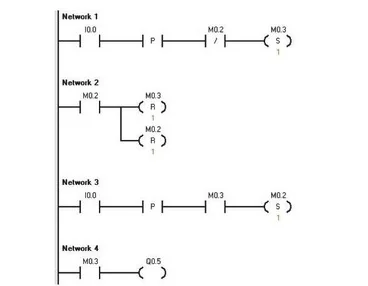
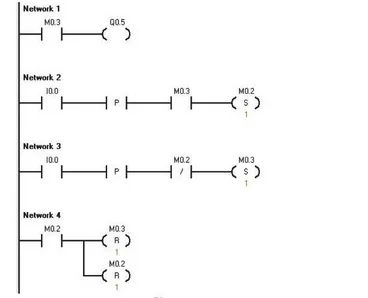
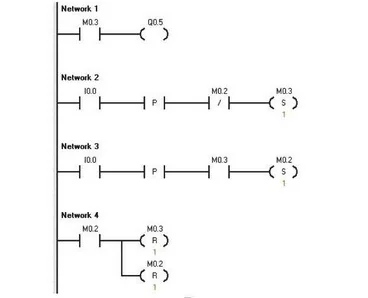
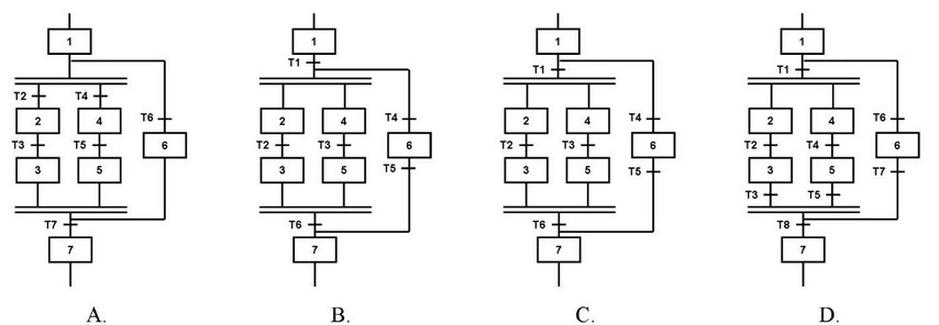
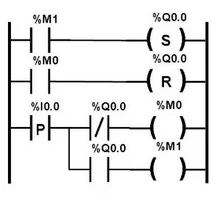
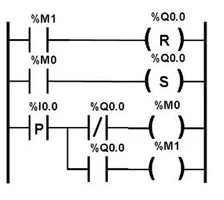
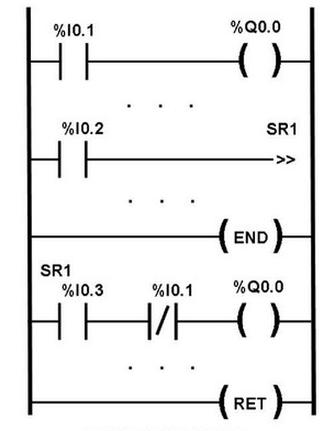
Graf sekwencji etapów i przejść niezgodny z zasadami budowy sieci SFC zamieszczono na rysunku
A. A.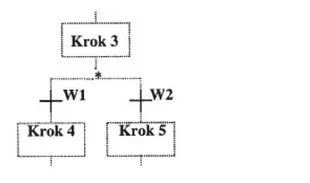
B. B.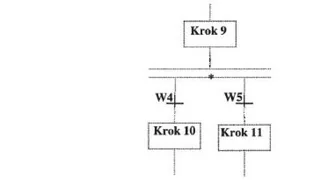
C. C.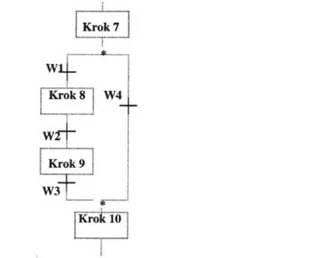
D. D.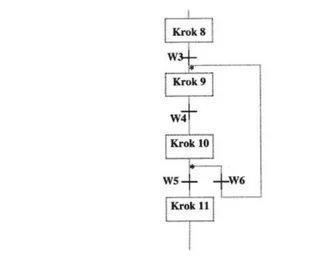
Analizując odpowiedzi, można zauważyć, że błędne odpowiedzi wydają się bazować na niepełnym zrozumieniu zasad budowy sieci SFC. W przypadku nieprawidłowych grafów, takich jak te przedstawione w innych opcjach, nie uwzględnia się kluczowych elementów synchronizacji, co prowadzi do wielu potencjalnych problemów w realizacji procesów. W sieciach SFC kluczowe jest zapewnienie, aby wszystkie równoległe przejścia były odpowiednio zdefiniowane, co oznacza, że każde z nich musi mieć jasno określone warunki rozpoczęcia i zakończenia. Nieprawidłowy projekt sieci SFC może prowadzić do nieprzewidywalnych wyników, takich jak niezgodności w wykonaniu procesów, co może z kolei powodować wzrost kosztów lub opóźnienia w produkcji. Typowym błędem jest przyjęcie, że równoległe kroki mogą być realizowane w dowolnej kolejności bez odpowiedniej synchronizacji, co jest sprzeczne z zasadami projektowania systemów automatyki. Ważne jest zrozumienie, że każdy aspekt systemu musi być zaprojektowany z myślą o spójności i efektywności, co można osiągnąć jedynie poprzez ścisłe trzymanie się zasad budowy sieci SFC, jak określono w standardach branżowych. Właściwe wdrożenie tych zasad nie tylko zwiększa wydajność, ale także poprawia bezpieczeństwo i niezawodność całego systemu automatyki.