Pytanie 1
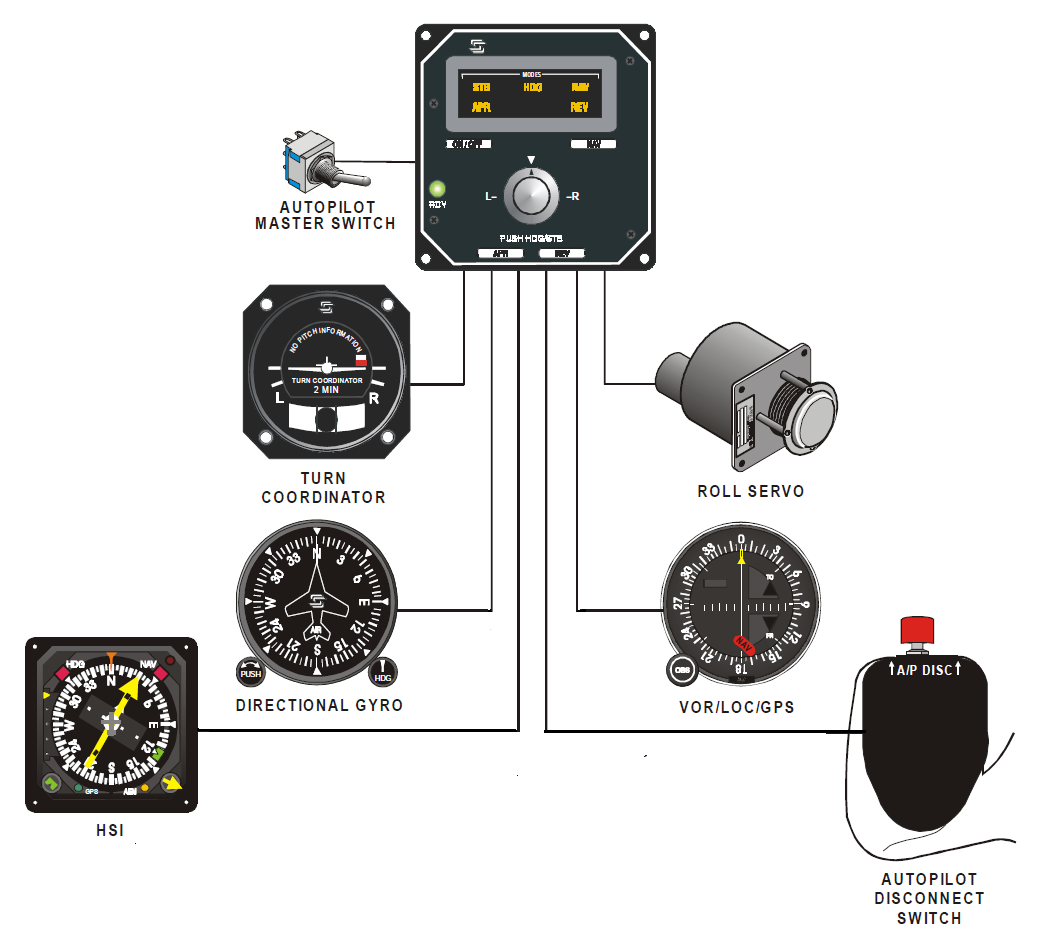
Wskaźnik oznaczony cyfrą 1 na tablicy przyrządów pokładowych w układzie Basic T to
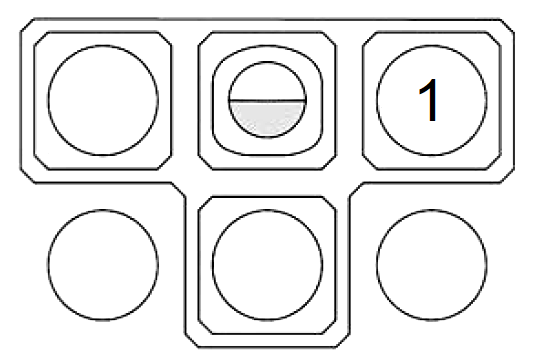
A. wysokościomierz.
B. prędkościomierz.
C. wariometr.
D. zakrętomierz.
Na tym rysunku kluczem jest zrozumienie logiki układu Basic T, a nie samego kształtu przyrządów. Wiele osób myli tutaj prędkościomierz z wysokościomierzem, bo oba są okrągłe, mają podobną skalę i w starszych samolotach wyglądają prawie identycznie. W klasycznym panelu, patrząc od góry, w środku mamy sztuczny horyzont, po jego lewej stronie prędkościomierz, po prawej wysokościomierz. Jeśli ktoś zaznacza prędkościomierz jako odpowiedź, zwykle kieruje się intuicją „coś ważnego musi być po prawej”, ale standardowe rozmieszczenie jest dokładnie odwrotne: prędkość po lewej, wysokość po prawej. Zakrętomierz także bywa mylony z przyrządami podstawowymi, bo w niektórych starszych szkolnych samolotach umieszczony jest wysoko na panelu. Jednak w koncepcji Basic T nie jest to instrument pierwszej kolejności. Zakrętomierz albo wskaźnik zakrętu i ślizgu znajduje się niżej, poza główną linią T, ponieważ pilot do kontroli położenia samolotu względem przestrzeni wykorzystuje przede wszystkim sztuczny horyzont, a nie zakrętomierz. Stąd przypisywanie pozycji oznaczonej „1” do zakrętomierza kłóci się z przyjętym w lotnictwie układem ergonomiczno-nawigacyjnym. Z kolei wariometr, czyli wskaźnik prędkości wznoszenia/opadania (vertical speed indicator), w ogóle nie wchodzi w skład podstawowego „T”, tylko jest zwykle montowany pod sztucznym horyzontem lub w jego pobliżu, ale niżej. Służy do oceny trendu zmian wysokości, a nie samej wysokości bezwzględnej. Typowym błędem jest utożsamianie każdego przyrządu związanego z pionowym ruchem samolotu z wysokościomierzem, co potem prowadzi do takich pomyłek. W praktyce serwisowej i szkoleniowej przyjmuje się, że układ Basic T jest punktem odniesienia zarówno przy projektowaniu klasycznych tablic, jak i nowoczesnych wyświetlaczy EFIS, więc dobrze jest „mieć w głowie” ten schemat: lewo – prędkość, środek – attitude, prawo – wysokość, dół – kurs. Dzięki temu łatwiej czytać kokpit i unikać takich nieporozumień.