Pytanie 1
Jaki rodzaj połączenia wałów napędowych przedstawiono na rysunku?
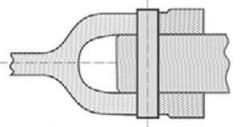
A. Sworzniowe.
B. Wpustowe.
C. Klinowe.
D. Wciskowe.
Wybór innej odpowiedzi na to pytanie może wynikać z niepełnego zrozumienia różnic pomiędzy poszczególnymi typami połączeń wałów napędowych. Połączenia wciskowe, na przykład, polegają na dopasowaniu wałów do siebie w taki sposób, że jeden wał jest wsuwany w drugi, co tworzy solidne połączenie, ale wymaga precyzyjnego wykonania oraz dostosowania do tolerancji, aby uniknąć problemów z luzem. Te połączenia są często stosowane tam, gdzie wymagana jest duża sztywność, lecz nie są one idealne w przypadku aplikacji, gdzie występują znaczne obciążenia dynamiczne. Z kolei połączenia wpustowe opierają się na zastosowaniu wpustów, które prowadzą do osadzenia wału w innej części, i podobnie jak w przypadku połączeń wciskowych, wymagają ścisłej współpracy elementów. Zastosowanie wpustów stwarza ryzyko uszkodzenia podczas niewłaściwej eksploatacji. Natomiast połączenia klinowe wykorzystują kliny jako elementy do zablokowania wałów, co również nie jest właściwe dla układów, w których wymagana jest wysoka elastyczność i odporność na zmiany obciążenia. W praktyce często zauważane są błędne założenia co do wytrzymałości czy przeznaczenia poszczególnych typów połączeń, co prowadzi do wyboru niewłaściwych rozwiązań w różnych aplikacjach inżynieryjnych. Zrozumienie tych różnic jest kluczowe dla efektywnego projektowania i stosowania połączeń wałów napędowych w praktyce inżynieryjnej.