Pytanie 1
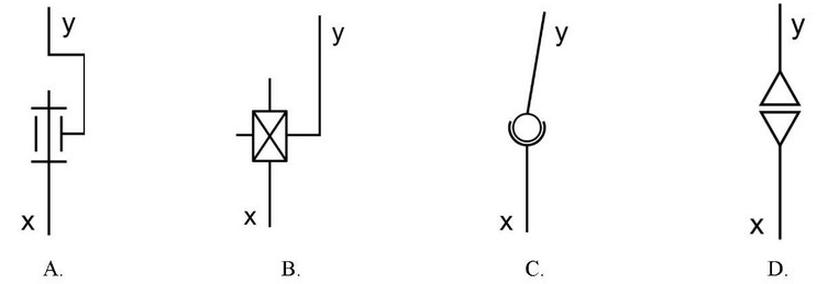
Zamieszczony symbol graficzny należy zastosować podczas rysowania schematu kinematycznego w celu przedstawienia

A. sprzęgła.
B. przekładni ciernej stożkowej.
C. hamulca.
D. przekładni walcowej ślimakowej.
Symbol graficzny użyty w schematach kinematycznych do oznaczania hamulca jest kluczowym elementem w analizie układów mechanicznych. Przedstawia on działanie hamulca, gdzie połączenie linii prostej z linią zakończoną strzałką skierowaną w dół wskazuje na siłę nacisku, która jest typowa dla mechanizmów hamulcowych. W praktyce, hamulce odgrywają fundamentalną rolę w zapewnieniu bezpieczeństwa i kontroli nad ruchem urządzeń mechanicznych. Zastosowanie tego symbolu pozwala na szybkie zidentyfikowanie elementu hamulcowego w schematach i ułatwia analizę dynamiki ruchu. W inżynierii mechanicznej stosowanie standardowych oznaczeń, takich jak te opisane w normach ISO, zapewnia jednolitość dokumentacji technicznej oraz ułatwia komunikację między inżynierami. Warto też zwrócić uwagę, że różne typy hamulców, jak np. tarczowe czy bębnowe, mogą różnić się w zakresie zastosowania symboli, jednak ich podstawowe funkcje pozostają niezmienne. Zrozumienie właściwej symboliki kinematycznej jest kluczowe dla analizy i projektowania układów mechanicznych.