Pytanie 1
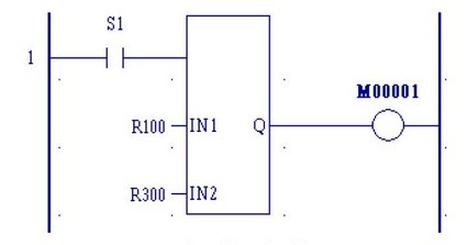
Której funkcji porównania należy użyć w celu wykrycia przekroczenia wartości temperatury przechowywanej w rejestrze R100 ponad wartość graniczną zapisaną w rejestrze R300?
A. LE (Less or Equal, "<=")
B. LT (Less Than, "<")
C. GT (Greater Than, ">")
D. GE (Greater or Equal, ">=")
Odpowiedź GT (Greater Than, ">") jest na pewno trafna. Żeby wiedzieć, że temperatura w rejestrze R100 jest wyższa niż ta granica w R300, musimy użyć funkcji, która to porównuje. Użycie tej funkcji gwarantuje, że system zareaguje tylko w momencie, gdy temperatura rzeczywiście przekroczy ustalony poziom. To naprawdę ważne w kontekście monitorowania takich rzeczy jak temperatura. Przykładowo, w automatyce przemysłowej, kontrolowanie temperatury ma kluczowe znaczenie dla bezpieczeństwa i efektywności całego procesu. Gdy korzystamy z funkcji GT, unikamy fałszywych alarmów, które mogłyby się zdarzyć, gdybyśmy zastosowali inne funkcje, typu GE czy LE, bo one nie rozpoznają przekroczeń, tylko równość czy wartości niższe. Taki sposób podejścia do analizy danych jest jak najbardziej zgodny z tym, co jest najlepsze w branży, co pokazuje, jak ważne jest dokładne dobieranie funkcji porównawczych w pracy inżyniera.