Pytanie 1
W jaki sposób, w zależności od wartości napięcia międzyfazowego sieci U i częstotliwości f, należy skojarzyć uzwojenie silnika przed podłączeniem go do sieci trójfazowej?
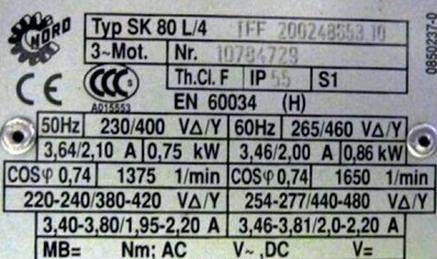
A. Jeżeli U = 230 V, f= 50 Hz w A, jeżeli U = 265 V, f=60 Hz w Y
B. Jeżeli U = 400 V, f= 50 Hz w Y, jeżeli U =460 V, f=60 Hz w Δ
C. Jeżeli U = 400 V, f= 50 Hz w Y, jeżeli U =265 V, f=60 Hz w A
D. Jeżeli U = 400 V, f= 50 Hz w A, jeżeli U =460 V, f=60 Hz w Y
Poprawna odpowiedź wskazuje, że dla napięcia międzyfazowego wynoszącego 400 V i częstotliwości 50 Hz uzwojenia silnika powinny być połączone w konfiguracji gwiazdy (Y). W przypadku, gdy napięcie wynosi 265 V przy częstotliwości 60 Hz, uzwojenia powinny być połączone w trójkąt (A). Taki wybór połączeń wynika z zasad doboru uzwojeń silników asynchronicznych do warunków zasilania. Połączenie w gwiazdę obniża napięcie na uzwojeniach do wartości 230 V przy zasilaniu 400 V, co jest korzystne w przypadku silników o mniejszych mocach. Warto zatem przy każdej instalacji zwrócić uwagę na tabliczkę znamionową silnika, aby odpowiednio dostosować parametry zasilania, co przełoży się na efektywność i bezpieczeństwo pracy urządzenia. Przykłady zastosowania tej wiedzy znajdują się w praktykach przemysłowych, gdzie dobór odpowiednich połączeń uzwojeń wpływa na wydajność procesów produkcyjnych oraz trwałość maszyn. Dodatkowo, zgodnie z normą PN-EN 60034-1, należy zawsze przestrzegać wskazówek producenta dotyczących podłączenia silnika do sieci zasilającej.