Pytanie 1
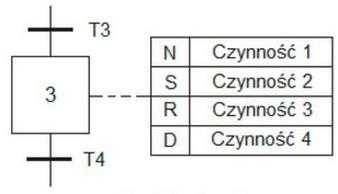
Na podstawie fragmentu algorytmu przedstawionego za pomocą sieci GRAFCET określ, jaki warunek musi być spełniony, aby został wykonany krok 8.
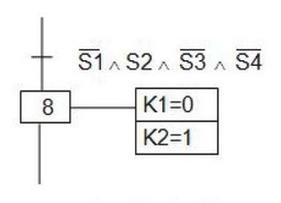
A. S1 = 1 i S2 = 0 i S3 = 1 i S4 = 1
B. S1 = 0 lub S2 = 1 lub S3 = 0 lub S4 = 0
C. S1 = 0 i S2 = 1 i S3 = 0 i S4 = 0
D. S1 = 1 lub S2 = 0 lub S3 = 1 lub S4 = 1
Odpowiedź S1 = 0 i S2 = 1 i S3 = 0 i S4 = 0 jest prawidłowa, ponieważ wszystkie wymienione zmienne muszą być spełnione jednocześnie, aby krok 8 algorytmu GRAFCET został wykonany. W kontekście automatyki, GRAFCET jest używany do modelowania sekwencyjnych procesów, gdzie każdy krok w algorytmie odpowiada konkretnemu stanowi urządzenia. Wymaganie, aby S1 było równe 0, oznacza, że dany element musi być wyłączony, podczas gdy S2 powinno być równe 1, co wskazuje, że inny element musi być aktywny. Takie podejście pozwala na precyzyjne kontrolowanie stanu maszyny i zabezpiecza przed niepożądanymi efektami, jakie mogą wystąpić w wyniku błędnych warunków. W praktyce, na przykład w systemach sterowania, właściwe ustawienie tych stanów jest kluczowe dla zapewnienia bezpieczeństwa operacji. Standardy takie jak IEC 61131 dotyczące programowania sterowników PLC zalecają jasne definiowanie warunków przejścia między stanami, co jest zgodne z zasadami opisanymi w GRAFCET. Warto również zauważyć, że stosowanie operatorów logicznych „i” w warunkach przejścia pozwala na wyeliminowanie sytuacji, w których niepożądane stany mogłyby wpływać na działanie procesu.