Pytanie 1
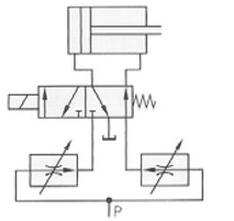
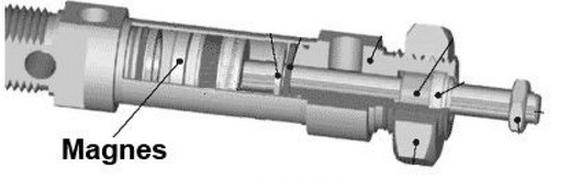
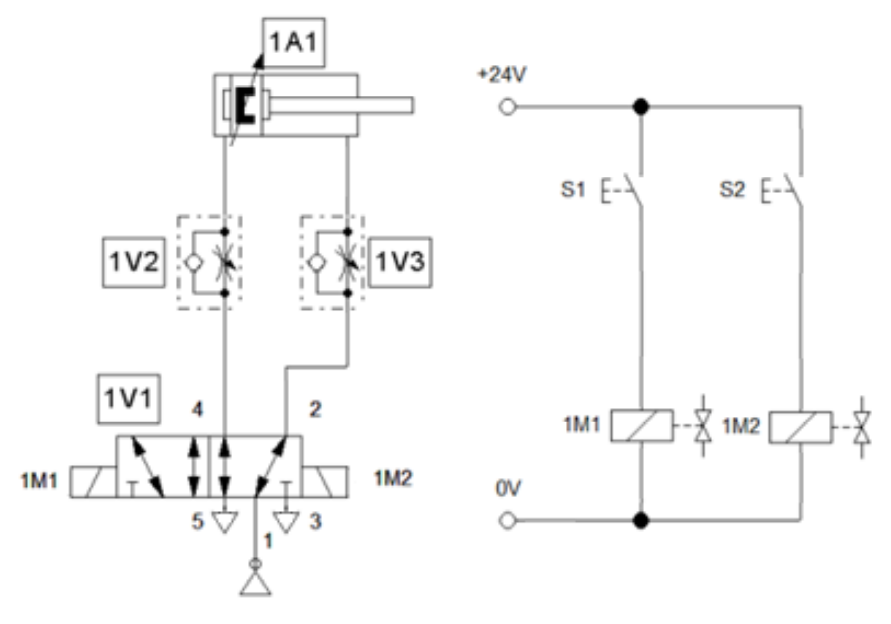
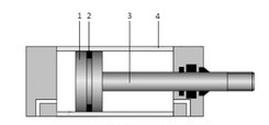
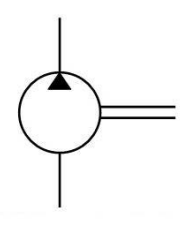
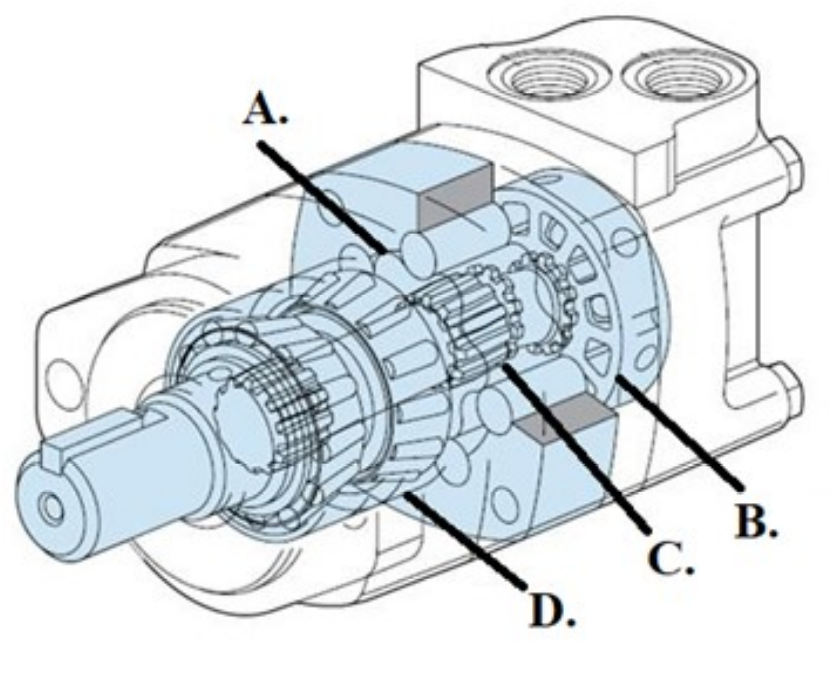
Którym z wymienionych mediów zasilany jest siłownik przedstawiony na rysunku?

A. Olejem hydraulicznym.
B. Roztworem poliglikolu.
C. Energią elektryczną.
D. Sprężonym powietrzem.
Sprężone powietrze jest powszechnie stosowanym medium zasilającym siłowniki pneumatyczne. Na zdjęciu widoczny jest siłownik pneumatyczny, co można rozpoznać dzięki obecności niebieskich węży, charakterystycznych dla systemów pneumatycznych. Siłowniki te są wykorzystywane w wielu aplikacjach przemysłowych, takich jak automatyka, robotyka, czy maszyny pakujące. Ich główną zaletą jest szybkość działania oraz łatwość w regulacji siły i prędkości ruchu. Ponadto, stosowanie siłowników pneumatycznych pozwala na osiągnięcie wysokich prędkości cyklu pracy, a także na ich łatwą integrację w systemach zautomatyzowanych. W kontekście standardów, siłowniki pneumatyczne są zgodne z normami ISO, co zapewnia ich wszechstronność i niezawodność w różnych zastosowaniach. Warto również podkreślić, że wykorzystanie sprężonego powietrza jako medium zasilającego jest zgodne z zasadami ochrony środowiska, gdyż w porównaniu do innych mediów, takich jak olej hydrauliczny, sprężone powietrze nie stwarza ryzyka zanieczyszczenia.