Pytanie 1
Kamery w kombajnie zbożowym znalazły zastosowanie do
A. sprawdzania czystości ziarna w przenośniku ziarnowym.
B. sprawdzania czystości ziarna w przenośniku niedomłotów.
C. prowadzenia kombajnu wzdłuż łanu.
D. mapowania plonu.
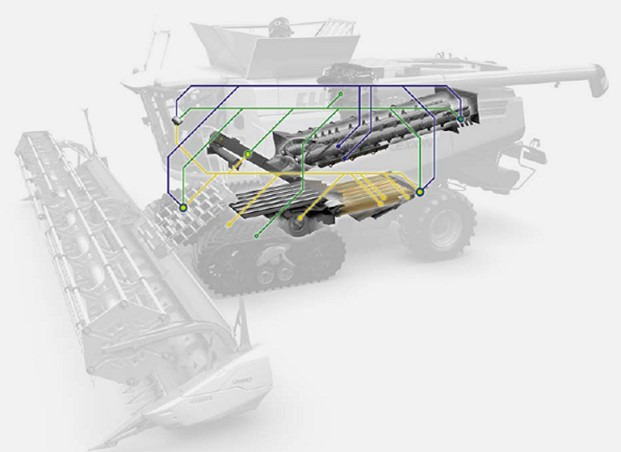
Kamery w kombajnie zbożowym budzą skojarzenia z wieloma nowoczesnymi funkcjami i stąd łatwo pomylić ich rzeczywistą rolę. W kombajnach faktycznie mamy mapowanie plonu, ale do tego wykorzystuje się przede wszystkim czujnik masy przepływającego ziarna w przenośniku ziarnowym oraz czujnik wilgotności, a pozycję bierze się z odbiornika GNSS. Kamera do mapowania plonu nie jest potrzebna, bo dokładniejsze i stabilniejsze są typowe czujniki masowe i elektroniczne układy pomiarowe, skalibrowane według procedur producenta. W efekcie kamera nie służy bezpośrednio do tworzenia map plonów, tylko bardziej do oceny jakości strumienia ziarna. Podobnie bywa z wyobrażeniem, że kamera prowadzi kombajn wzdłuż łanu. Prowadzenie wzdłuż łanu opiera się na systemach automatycznego kierowania, które używają sygnału GNSS z korekcją (RTK, EGNOS itp.) oraz czujników kąta skrętu kół, czasem czujników ultradźwiękowych czy laserowych przy hederze. Kamery mogą wspomagać operatora wizualnie, ale główny algorytm prowadzenia opiera się na danych z nawigacji satelitarnej, a nie na analizie obrazu łanu. Kolejne częste nieporozumienie dotyczy przenośnika niedomłotów. W praktyce kontroluje się przede wszystkim czystość ziarna wychodzącego z kombajnu, czyli właśnie w przenośniku ziarnowym, bo to jest produkt końcowy, który trafia do zbiornika. Niedomłoty to materiał wracający do ponownego omłotu, tam ważniejsze są czujniki obciążenia i przepływu oraz sama regulacja układu młócącego, niż dokładna analiza obrazu. Kamera nad niedomłotami miałaby mniejszy sens użytkowy, bo i tak ten materiał wraca do obiegu. Typowym błędem myślowym jest wrzucanie wszystkich kamer do jednego worka i zakładanie, że skoro coś „widzi”, to może wszystko: prowadzić maszynę, mapować plon i jeszcze diagnozować wszystkie procesy. W rzeczywistości każdy system w kombajnie jest projektowany pod konkretną funkcję, a kamera jest tutaj przede wszystkim narzędziem do optycznej oceny czystości ziarna w przenośniku ziarnowym, co jest spójne z praktyką producentów i zasadami dobrej eksploatacji kombajnów.