Pytanie 1
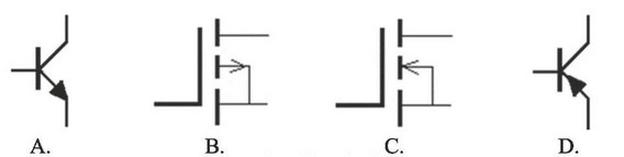
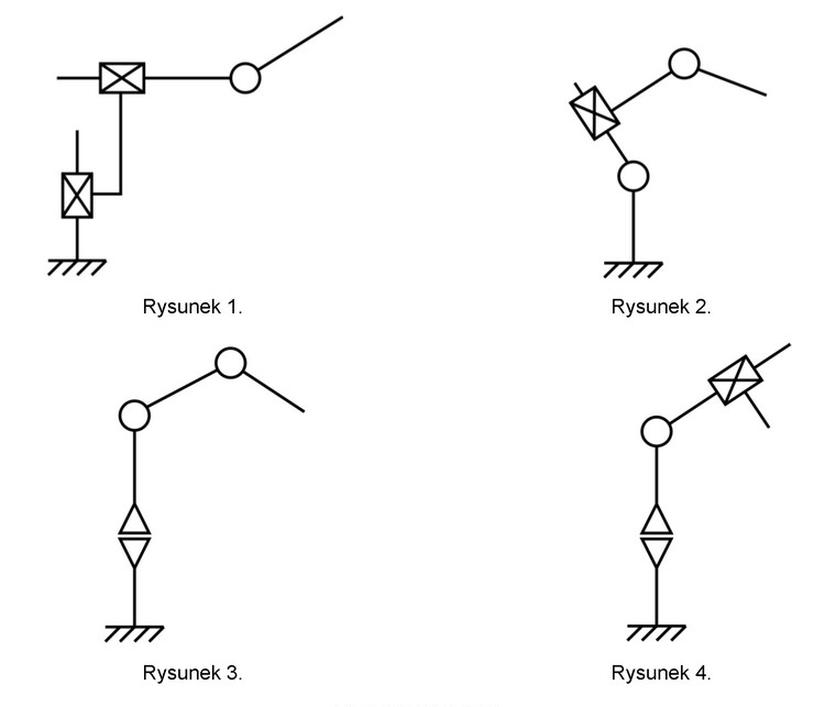
Prawidłowo narysowany symbol graficzny podpory samonastawnej stosowany na schematach mechanicznych przedstawiono na rysunku
A. A.
B. B.
C. C.
D. D.
Wybór odpowiedzi A, B lub C wskazuje na brak znajomości standardów rysunku technicznego, co może prowadzić do nieporozumień w procesie projektowania. Każdy z tych symboli nie oddaje istoty podpory samonastawnej, co jest kluczowe dla zrozumienia jej funkcji w mechanice. Często zdarza się, że osoby związane z branżą mylą różne symbole, co może wynikać z braku doświadczenia z dokumentacją techniczną lub niedostatecznej znajomości standardów rysunkowych. Na przykład, symbole te mogą wyglądać podobnie do innych, co może prowadzić do błędnych interpretacji. Takie nieporozumienia mogą mieć poważne konsekwencje w praktyce, ponieważ właściwe zrozumienie rysunków technicznych jest niezbędne dla zapewnienia bezpieczeństwa i efektywności w projektach. W kontekście podpory samonastawnej, jej rola w systemach mechanicznych polega na umożliwieniu ruchu w określonym zakresie, co jest kluczowe w wielu zastosowaniach, takich jak hydraulika czy mechanika precyzyjna. W związku z tym, stosowanie niewłaściwych symboli może prowadzić do błędnych założeń projektowych i problemów w późniejszej eksploatacji urządzeń. Rozumienie znaczenia i prawidłowego zastosowania symboliki rysunkowej jest fundamentalną umiejętnością dla każdego inżyniera, a ignorowanie jej może prowadzić do poważnych problemów inżynieryjnych.