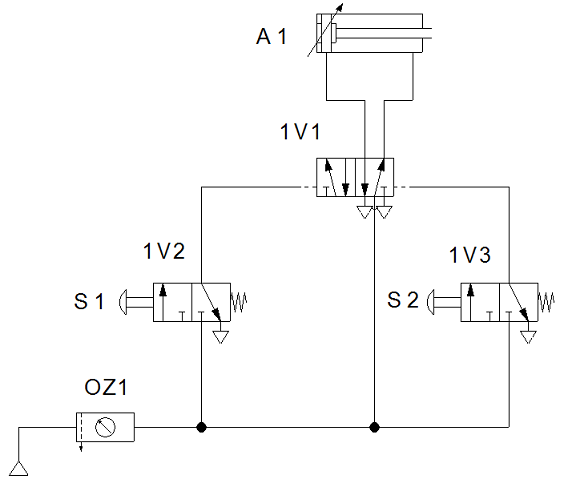
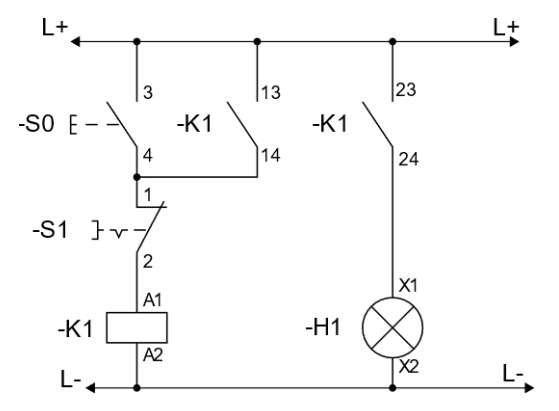
Pytanie 1
Oględziny instalacji hydraulicznej obejmują
A. sprawdzenie stanu przewodów.
B. wymianę rozdzielacza.
C. wymianę filtra oleju w układzie.
D. pomiar natężenia prądu obciążenia pompy.
Sprawdzenie stanu przewodów to absolutna podstawa, jeśli chodzi o oględziny instalacji hydraulicznej. To nie jest tylko rzucenie okiem na węże czy rurki, lecz dokładna ocena, czy nie ma przetarć, pęknięć, wycieków i czy opaski mocujące są odpowiednio dokręcone. Moim zdaniem regularne inspekcje przewodów mogą zapobiec bardzo kosztownym awariom, bo nawet drobny wyciek w układzie powoduje utratę ciśnienia, a przy okazji grozi zabrudzeniem środowiska i ryzykiem wypadku w miejscu pracy. W wielu zakładach, zgodnie z normami PN-EN ISO 4413, oględziny przewodów są obowiązkowym elementem harmonogramu przeglądów okresowych. Branżowo mówi się, że „najtańsza naprawa to ta, której udało się uniknąć”, więc dokładne oględziny pozwalają wykryć zużycie zanim zrobi się z tego poważny problem. Doświadczony serwisant zawsze zwraca uwagę na ślady oleju, deformacje, a nawet nietypowe ułożenie węży. Z mojego doświadczenia wynika, że lekceważenie drobiazgów na tym etapie często kończy się przestojem maszyny. Oględziny instalacji hydraulicznej w praktyce zaczynają się właśnie od przewodów – to taki standard bezpieczeństwa i jakości.