Pytanie 1
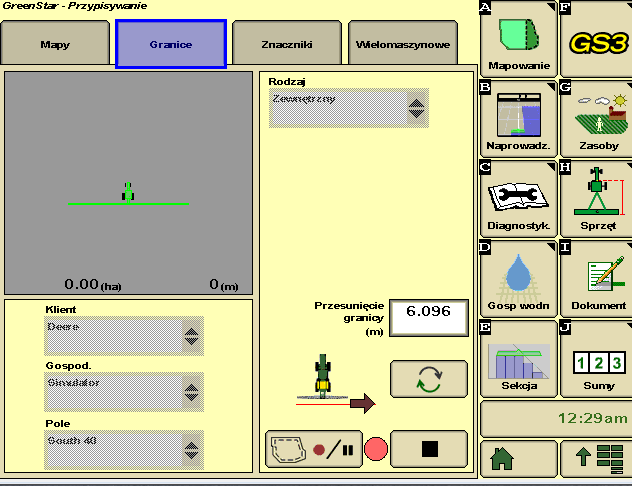
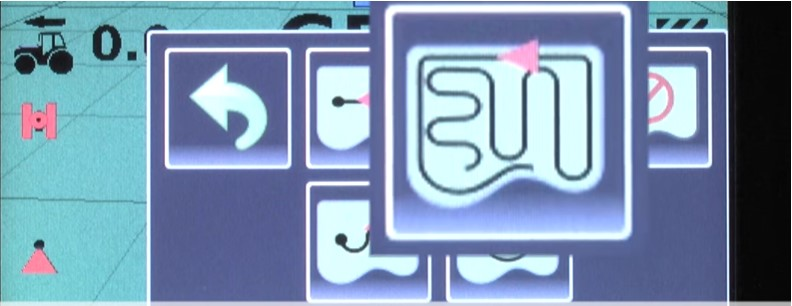
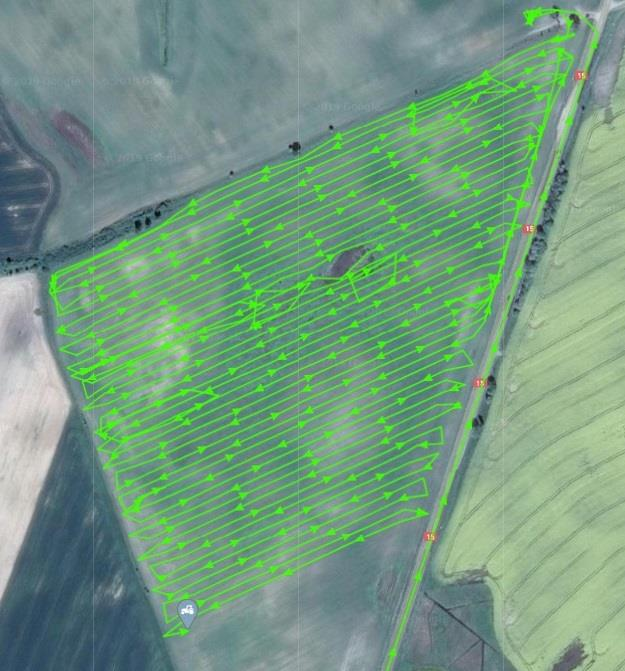
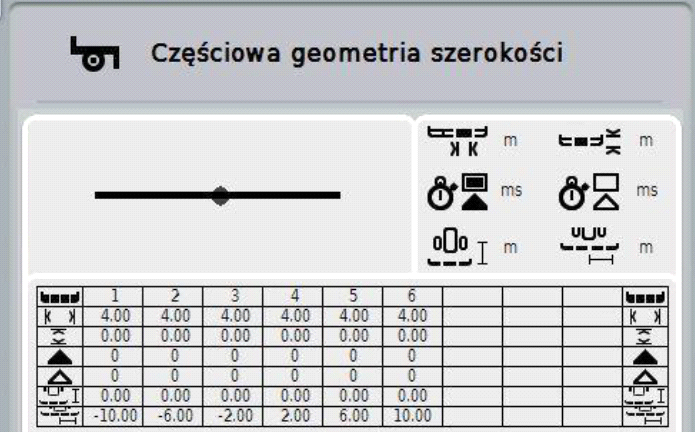
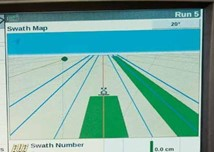
Podczas prac z narzędziem o szerokości 8 metrów zgodnie z przejazdami pokazanymi na wyświetlaczu zaprogramowano przejazdy co
A. 24 m
B. 8 m
C. 16 m
D. 4 m
Odpowiedź 16 m wynika z tego, że na terminalu przejazdy (linie prowadzenia) zostały zaprogramowane co dwie szerokości robocze narzędzia. Szerokość maszyny to 8 m, więc standardowo, przy klasycznej jeździe równoległej A–B, kolejne ścieżki prowadzenia ustawia się co 8 m, tak żeby kolejne przejazdy stykały się krawędziami roboczymi i nie było ani zakładek, ani omijaków. Na pokazanym ekranie widać jednak, że aktywny przejazd jest co drugą linię, czyli terminal prowadzi ciągnik tak, jakby szerokość ścieżki wynosiła 16 m. Jest to typowa sytuacja np. przy wykonywaniu ścieżek technologicznych pod opryskiwacz lub rozsiewacz o szerszym rozstawie roboczym niż aktualne narzędzie uprawowe. W praktyce wygląda to tak: agregat uprawowy ma 8 m, ale opryskiwacz polowy 24 m, więc ścieżki technologiczne ustawia się tak, aby co kilka przejazdów szerokością 8 m wypadał przejazd pod belkę 24 m. Jednym ze sposobów jest właśnie programowanie linii prowadzenia co wielokrotność szerokości narzędzia, tutaj 2×8 m = 16 m, a resztę ogarnia operator, wykonując dodatkowe przejazdy pomiędzy liniami. Moim zdaniem to bardzo dobre ćwiczenie z myślenia przestrzennego w nawigacji GNSS – uczy, że szerokość narzędzia i odstęp między liniami prowadzenia nie zawsze muszą być identyczne, ważne jest logiczne powiązanie z technologią uprawy i późniejszymi zabiegami. W nowoczesnych systemach automatycznego prowadzenia (np. z RTK) takie planowanie przejazdów pozwala zminimalizować liczbę ścieżek technologicznych, ograniczyć ugniatanie gleby i lepiej dopasować geometrię przejazdów do szerokości różnych maszyn w gospodarstwie.