Pytanie 1
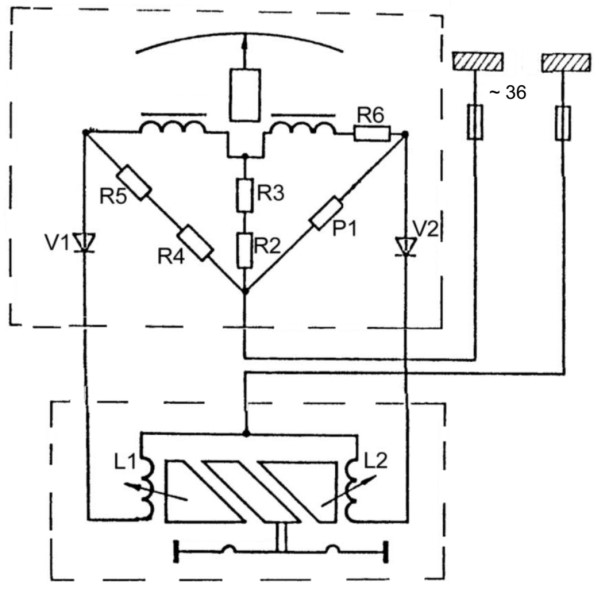
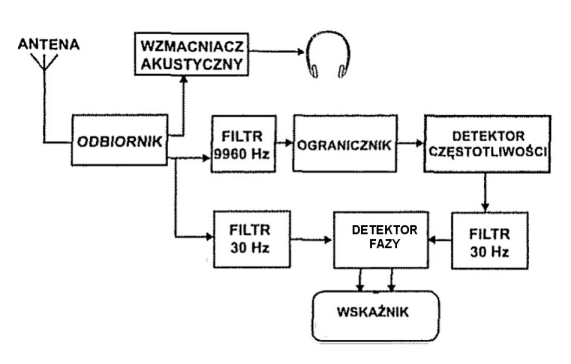
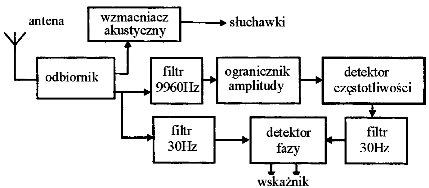
Na rysunku przedstawiono schemat blokowy odbiornika
A. ILS
B. VOR
C. DME
D. MLS
Schemat, który widzisz, na pierwszy rzut oka może kojarzyć się z kilkoma różnymi systemami nawigacyjnymi, bo i DME, i MLS, i ILS pracują w szeroko pojętej rodzinie sygnałów nawigacyjnych i często pojawia się tam podnośna 9960 Hz. I tu jest właśnie pułapka: samo wystąpienie częstotliwości 9960 Hz nie wystarcza, żeby poprawnie rozpoznać system. Kluczem jest struktura całego toru sygnałowego. W DME główną rolę gra pomiar czasu propagacji impulsów między statkiem powietrznym a stacją naziemną. Odbiornik DME zawiera układy generacji i korelacji impulsów, liczniki czasu, pętle śledzące odpowiedzi, a nie detektor fazy sygnałów 30 Hz. Nie znajdziesz tam takiego klasycznego toru audio z filtrem 30 Hz i detektorem częstotliwości dla 9960 Hz, bo system jest impulsowy, a nie oparty na analizie fazy niskiej częstotliwości. W MLS sytuacja też wygląda inaczej: choć jest to system precyzyjnego podejścia, to sygnały są nadawane w paśmie SHF, a informacja o kącie dochodzi z analizy wiązek skanujących w czasie. Schemat blokowy MLS będzie pełen układów przetwarzania sygnałów szerokopasmowych, synchronizacji z impulsami czasowymi, a nie prostych filtrów 30 Hz i 9960 Hz z klasycznym detektorem fazy. Mylenie MLS z VOR wynika często z tego, że oba systemy podają informację kątową, ale ich metoda jest zupełnie inna. ILS z kolei wykorzystuje ideę porównania głębokości modulacji dwóch sygnałów 90 Hz i 150 Hz (dla lokalizera i ścieżki schodzenia). W torze odbiorczym ILS spodziewalibyśmy się więc filtrów 90/150 Hz, detektorów poziomu i układów różnicowych, a nie pojedynczego filtru 30 Hz i detektora fazy. Podnośna 9960 Hz bywa używana w ILS LOC, ale nie w taki sposób jak w klasycznym odbiorniku VOR, gdzie 9960 Hz niesie referencyjny 30 Hz. Typowy błąd myślowy przy takich zadaniach to łapanie się jednej liczby (np. 9960 Hz) bez analizy, jakie bloki dalej występują: czy jest detekcja fazy, czy impulsów, czy porównanie amplitud. W praktyce serwisowej i egzaminacyjnej ważne jest, żeby patrzeć na całą architekturę toru: obecność detektora fazy 30 Hz, filtru 30 Hz i osobnego toru 9960 Hz jednoznacznie wskazuje na VOR, a nie na DME, MLS czy ILS, nawet jeśli nazwy systemów brzmią podobnie i wszystkie są opisane w tych samych rozdziałach podręczników.