Pytanie 1
Którą operację należy wykonać w programie CAD, aby ze szkicu przedstawionego na rysunku 1. otrzymać bryłę 3D przedstawioną na rysunku 2.?
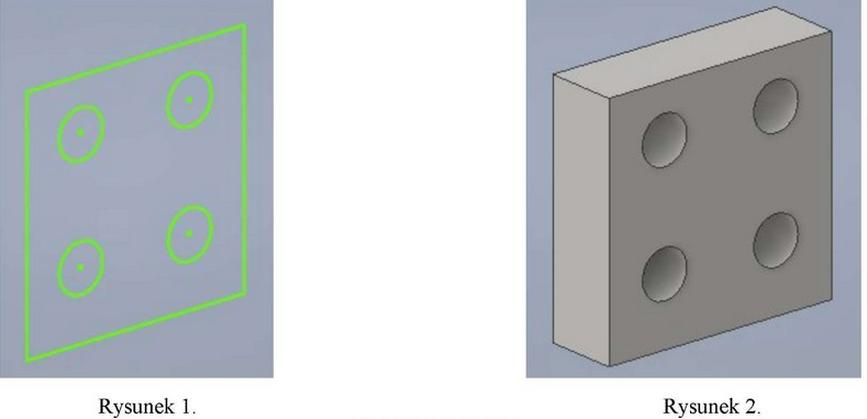
A. Wyciągnięcie złożone.
B. Przeciągnięcie po ścieżce.
C. Wyciągnięcie obrotowe.
D. Wyciągnięcie proste.
Zastosowanie wyciągnięcia złożonego w kontekście przekształcenia szkicu w bryłę 3D jest niewłaściwe, ponieważ ta operacja jest przeznaczona do bardziej skomplikowanych kształtów, które wymagają jednoczesnego wyciągnięcia wielu elementów z różnych kierunków. Tego rodzaju podejście wprowadza niepotrzebne komplikacje, gdyż w tym przypadku potrzebna jest jedynie prosta operacja wyciągnięcia, co może prowadzić do błędów w projektowaniu. Przykładowo, wyciągnięcie obrotowe, które jest kolejną z błędnych odpowiedzi, służy do tworzenia brył obrotowych na podstawie konturów szkiców. Użycie tej metody dla przedstawionego szkicu również nie byłoby odpowiednie, gdyż w rysunku 2. nie obserwujemy symetrii obrotowej. Z kolei przeciągnięcie po ścieżce jest techniką, która ma zastosowanie w sytuacjach, gdzie wymagane jest przekształcenie szkicu wzdłuż zadanej ścieżki, co w omawianym przypadku nie znalazłoby zastosowania, ponieważ bryła na rysunku 2. nie wymaga takiego podejścia. Kluczowym błędem w myśleniu jest zatem niewłaściwe dobieranie operacji do specyfiki rysunku i zamierzonego efektu 3D, co może prowadzić do nieefektywnego wykorzystania zasobów oraz zwiększenia czasu projektowania.