Pytanie 1
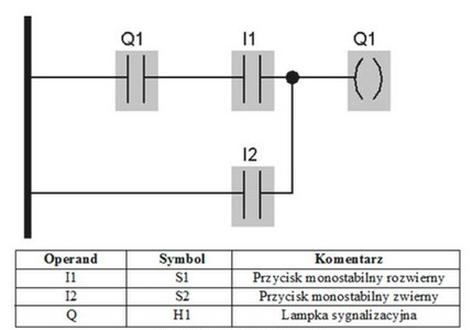
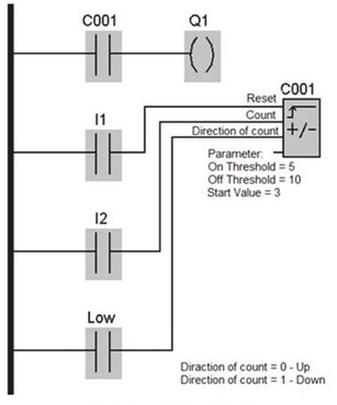
Jaka będzie reakcja sterownika, realizującego program przedstawiony na schemacie, na wciśnięcie przycisku zwiernego dołączonego do wejścia I1?
A. Stan wewnętrzny licznika C001 zostanie zmniejszony o 1.
B. Ulegnie zmianie kierunek zliczania impulsów wejściowych przez licznik C001.
C. Zostanie ustawiony zaprogramowany stan początkowy licznika C001.
D. Stan wewnętrzny licznika C001 zostanie zwiększony o 1.
Odpowiedź, że zostanie ustawiony zaprogramowany stan początkowy licznika C001, jest właściwa, ponieważ przycisk zwierny podłączony do wejścia I1 pełni rolę resetującą. W momencie, gdy przycisk zostaje wciśnięty, sygnał resetu zostaje aktywowany, co powoduje wyzerowanie zawartości licznika i jego ustawienie na wartość początkową, zdefiniowaną w programie. W praktyce, takie zastosowanie jest niezwykle istotne w systemach automatyki, gdzie konieczne jest przywracanie urządzeń do stanu początkowego w przypadku błędów czy wyjątkowych sytuacji. Standardy związane z programowaniem sterowników PLC, takie jak IEC 61131-3, sugerują, że każda aplikacja powinna mieć możliwość resetowania kluczowych elementów systemu, co jest kluczowe dla stabilności i niezawodności całego układu. Zrozumienie tej zasady jest fundamentalne, zwłaszcza przy projektowaniu systemów, które wymagają niezawodności operacyjnej i elastyczności w obliczu zmieniających się warunków operacyjnych.