Pytanie 1
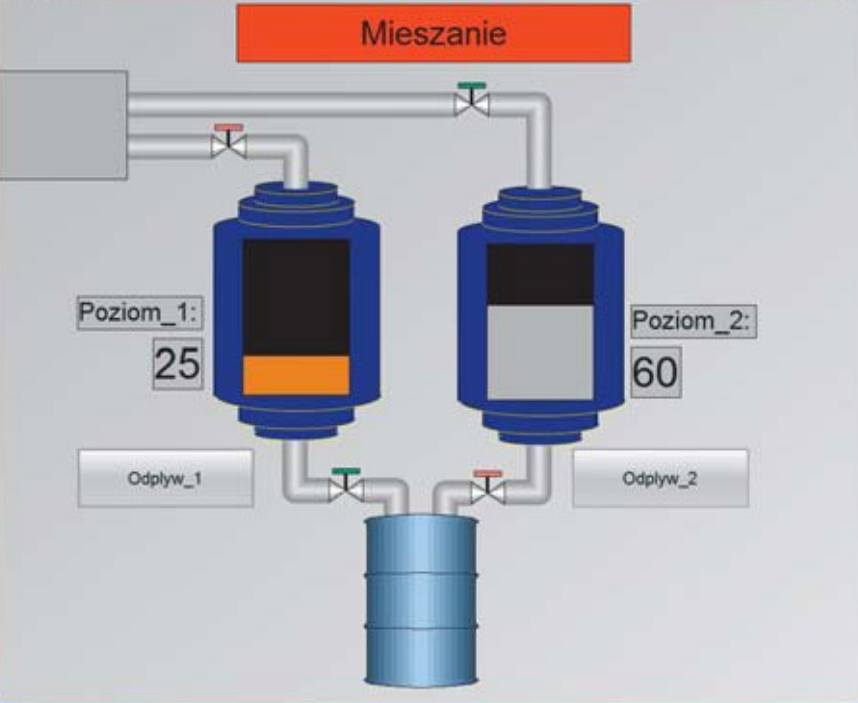
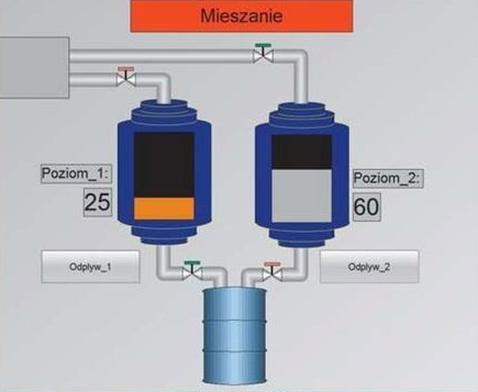
Aby zobrazować funkcjonowanie systemu mechatronicznego na panelu HMI, należy zainstalować oprogramowanie typu
A. SCADA
B. CAE
C. CAD
D. CAM
Brak odpowiedzi na to pytanie.
Wyjaśnienie poprawnej odpowiedzi:
Odpowiedź SCADA (Supervisory Control and Data Acquisition) jest poprawna, ponieważ oprogramowanie to jest kluczowe dla wizualizacji i monitorowania systemów mechatronicznych w czasie rzeczywistym. SCADA umożliwia integrację różnych urządzeń i czujników, co pozwala na efektywne zbieranie danych oraz ich analizę. Dzięki graficznym interfejsom użytkownika (HMI), operatorzy mogą w prosty sposób przeglądać dane, reagować na alarmy oraz zarządzać procesami. Przykładem zastosowania SCADA może być kontrola procesów produkcyjnych w fabrykach, gdzie system zbiera informacje o stanie maszyn i automatycznie podejmuje działania w celu utrzymania wydajności produkcji. W branży przemysłowej SCADA jest standardem, który wspiera automatyzację oraz poprawia efektywność operacyjną, wpisując się w najlepsze praktyki zarządzania procesami. Dodatkowo, wiele systemów SCADA jest zgodnych z międzynarodowymi standardami, co zapewnia ich interoperacyjność i umożliwia integrację z innymi systemami zarządzania.
Odpowiedź SCADA (Supervisory Control and Data Acquisition) jest poprawna, ponieważ oprogramowanie to jest kluczowe dla wizualizacji i monitorowania systemów mechatronicznych w czasie rzeczywistym. SCADA umożliwia integrację różnych urządzeń i czujników, co pozwala na efektywne zbieranie danych oraz ich analizę. Dzięki graficznym interfejsom użytkownika (HMI), operatorzy mogą w prosty sposób przeglądać dane, reagować na alarmy oraz zarządzać procesami. Przykładem zastosowania SCADA może być kontrola procesów produkcyjnych w fabrykach, gdzie system zbiera informacje o stanie maszyn i automatycznie podejmuje działania w celu utrzymania wydajności produkcji. W branży przemysłowej SCADA jest standardem, który wspiera automatyzację oraz poprawia efektywność operacyjną, wpisując się w najlepsze praktyki zarządzania procesami. Dodatkowo, wiele systemów SCADA jest zgodnych z międzynarodowymi standardami, co zapewnia ich interoperacyjność i umożliwia integrację z innymi systemami zarządzania.