Pytanie 1
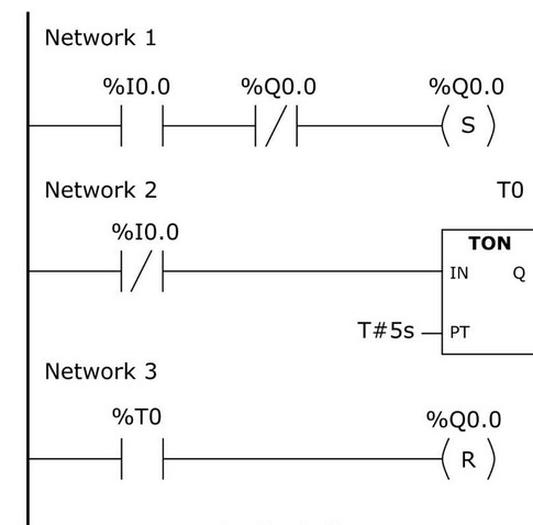
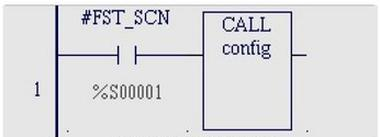
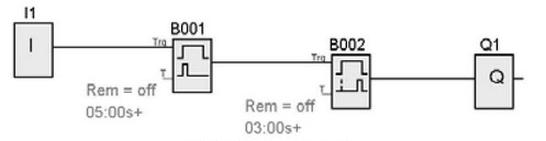
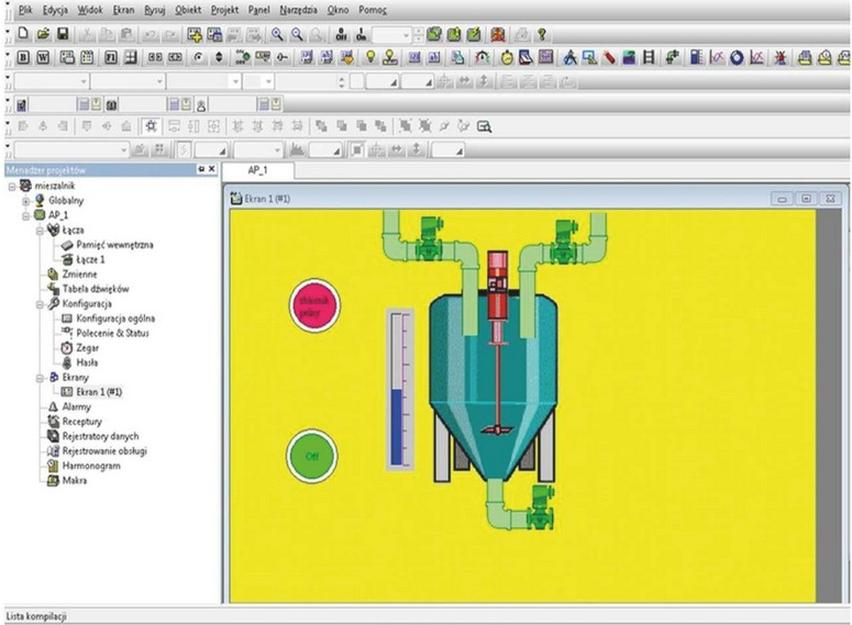
Jakie jest przeznaczenie programu, którego zrzut ekranowy przedstawiono na rysunku?
A. Symulacja obróbki CAM.
B. Programowanie sterowników PLC.
C. Programowanie paneli operatorskich HMI.
D. Modelowanie 3D.
Wybór innych odpowiedzi może wydawać się na pierwszy rzut oka logiczny, jednak każda z nich ma swoje ograniczenia. Programowanie sterowników PLC, na przykład, wiąże się z tworzeniem kodu do sterowania procesami automatyki, co nie ma zastosowania w kontekście HMI. Sterowniki PLC są odpowiedzialne za przetwarzanie sygnałów z czujników i wysyłanie poleceń do aktuatorów, a ich programowanie wykorzystuje zazwyczaj języki takie jak Ladder Logic, a nie wizualne interfejsy, jak przedstawione na zrzucie. Z kolei symulacja obróbki CAM koncentruje się na procesach związanych z wytwarzaniem części poprzez obrabiarki CNC, gdzie programy do CAM tworzą ścieżki narzędzi, a nie interfejsy użytkownika. Modelowanie 3D odnosi się do tworzenia trójwymiarowych obiektów i grafik, co jest zupełnie inną dziedziną, nie związaną z interfejsami operatorów. Przykłady tych błędnych odpowiedzi często wynikają z mylnego przekonania, że każda aplikacja inżynieryjna służy podobnym celom, podczas gdy każda z nich ma specyficzne zastosowania i techniki projektowe, które są kluczowe dla efektywności i bezpieczeństwa w danej dziedzinie. W ten sposób, zrozumienie różnic między tymi obszarami jest istotne dla prawidłowego podejścia do automatyzacji i inżynierii procesu.