Pytanie 1
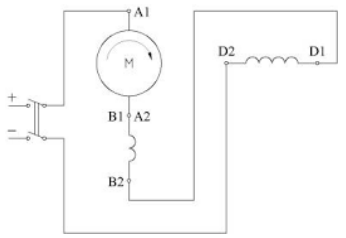
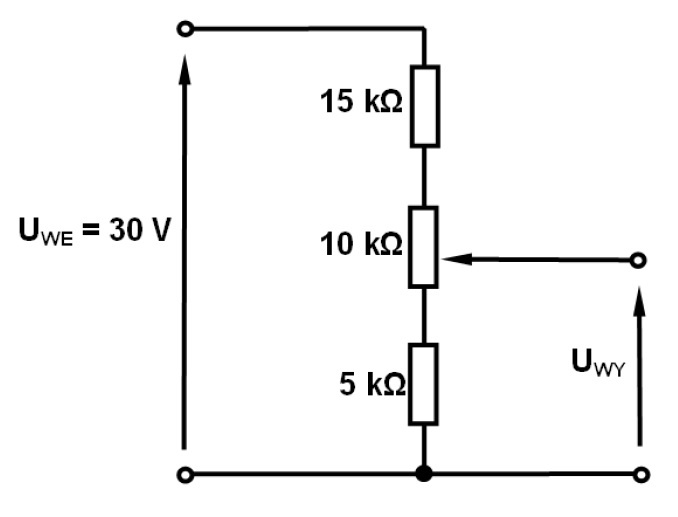
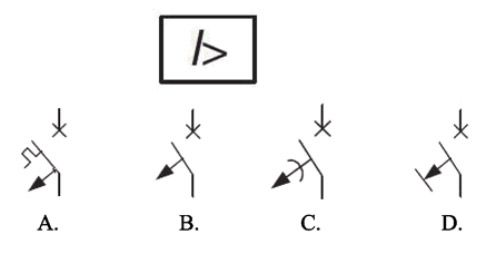
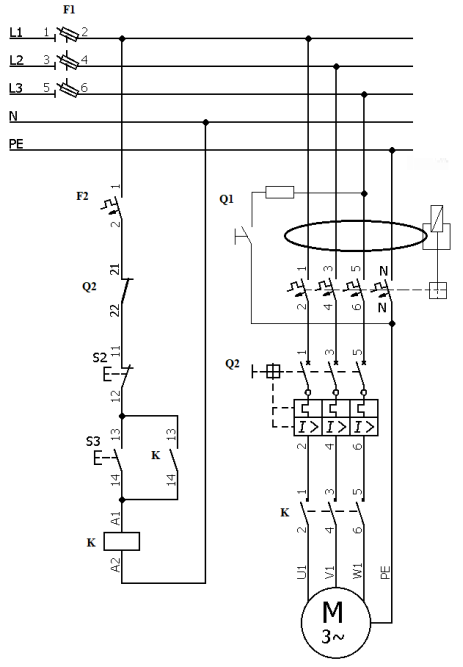
Który element regulacyjny występuje w układzie przedstawionym na schemacie?
A. Autotransformator.
B. Dławik.
C. Regulator indukcyjny.
D. Przesuwnik fazowy.
Autotransformator to specjalny typ transformatora, który charakteryzuje się posiadaniem jednego wspólnego uzwojenia dla obwodów pierwotnego i wtórnego. Dzięki temu, autotransformatory są w stanie zmieniać napięcie z zachowaniem mniejszych strat mocy, co czyni je bardziej efektywnymi w zastosowaniach, gdzie wymagane są niewielkie zmiany napięcia. Przykłady zastosowania autotransformatorów obejmują regulację napięcia w zasilaczach oraz w systemach zasilania silników elektrycznych. W praktyce, autotransformatory są szeroko stosowane w energetyce do podnoszenia lub obniżania napięcia w liniach przesyłowych, co jest zgodne z dobrymi praktykami branżowymi, zwłaszcza w kontekście efektywności energetycznej. Używanie autotransformatorów zamiast tradycyjnych transformatorów separacyjnych pozwala na zmniejszenie rozmiaru urządzenia oraz jego kosztów, co jest istotnym czynnikiem w projektowaniu systemów elektrycznych. Zrozumienie działania autotransformatora jest kluczowe dla inżynierów zajmujących się projektowaniem i wdrażaniem systemów zasilania.