Pytanie 1
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Wynik: 26/40 punktów (65,0%)
Wymagane minimum: 20 punktów (50%)
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Który zawór powinien być uwzględniony w systemie sterowania pneumatycznego, aby przyspieszyć prędkość wsuwu tłoczyska siłownika?
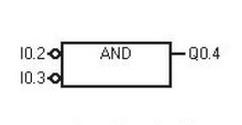
Jaką funkcję logiczną realizuje blok przedstawiony na rysunku?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Aby otrzymać poprawny wynik pomiaru temperatury przy użyciu czujnika termoelektrycznego, należy zagwarantować
W systemie regulacji dwupołożeniowej
Tłoczysko siłownika pneumatycznego porusza się poziomo ruchem prostoliniowym, lecz z wolniejszą prędkością niż zazwyczaj. Co może być najprawdopodobniejszą przyczyną opóźnienia ruchu siłownika?
Gdzie można znaleźć informacje na temat wymagań oraz częstotliwości realizacji prac konserwacyjnych dla konkretnego urządzenia mechatronicznego?
Jakie są różnice między blokiem funkcyjnym przerzutnika RS a blokiem przerzutnika SR w PLC?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Młot pneumatyczny, który jest częścią robota frezarskiego, ma zamontowane urządzenie do smarowania. Jakie z zaleceń dotyczących uzupełnienia oleju, jeśli nie zostanie spełnione, może prowadzić do obrażeń pracownika obsługującego?
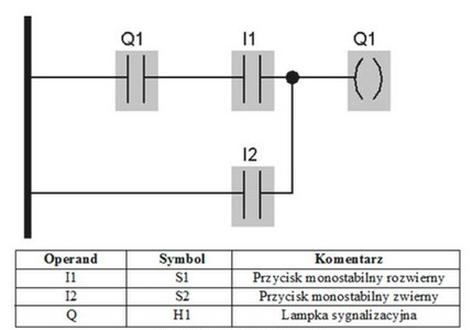
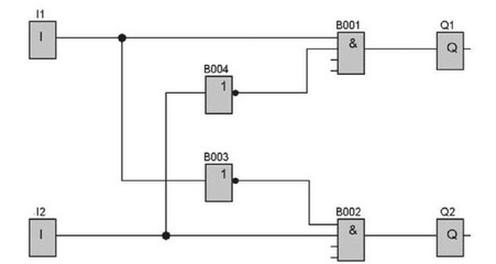
Na podstawie analizy programu i listy przyporządkowania określ działanie układu sterowania.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Który zapis w języku LD jest odpowiednikiem instrukcji NOR w języku IL?

Które z poniższych działań jest częścią procesu programowania sterowników PLC?
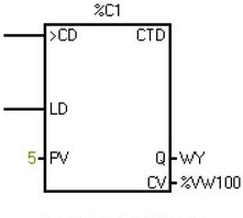
Wejście LD przedstawionego na rysunku licznika służy do
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Gdzie nie powinno się stosować urządzeń mechatronicznych z silnikiem komutatorowym?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Jaka jest podstawowa funkcja przekaźnika w układach elektrycznych?
Podczas pracy z siłownikiem hydraulicznym dostrzeżono drobne zadrapania na tłoczysku. Jak należy zlikwidować te rysy?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
W jakim celu przeprowadza się diagnostykę systemów mechatronicznych?
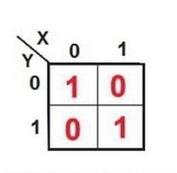
Która funkcja logiczna odpowiada zapisowi w tabeli Karnaugh?
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
To pytanie jest dostępne tylko dla uczniów i nauczycieli. Zaloguj się lub utwórz konto aby zobaczyć pełną treść pytania.
Odpowiedzi dostępne po zalogowaniu.
Wyjaśnienie dostępne po zalogowaniu.
Która kombinacja stanów logicznych nigdy nie pojawi się na wyjściach sterownika działającego zgodnie z przedstawionym programem?
Selsyn trygonometryczny (resolver) wykorzystywany w serwomechanizmach ma na celu pomiar
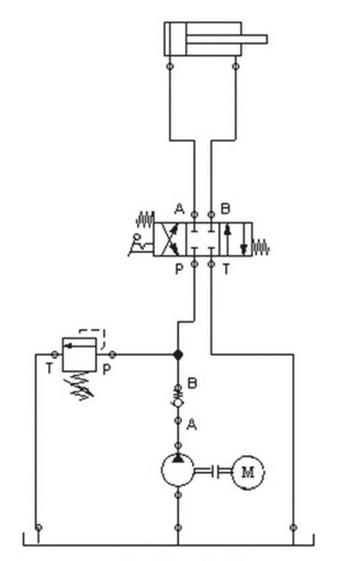
Które z mediów roboczych należy doprowadzić do układu, którego schemat przedstawiono na rysunku?
Jaki będzie stan na wyjściu Q0.3 w przypadku jednoczesnego podania sygnału logicznego "1″ na wejście 10.0 i 10.2?

Wskaż, jaka czynność powinna zostać zrealizowana przed przystąpieniem do konserwacji instalacji sprężonego powietrza, zaraz po wyłączeniu i odpowietrzeniu sprężarki oraz opróżnieniu zbiorników powietrza?