Pytanie 1
Który przycisk joysticka należy nacisnąć, aby nastąpiło włączenie sekcji opryskiwacza od lewej do prawej strony?
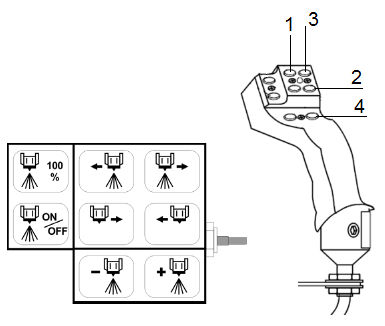
A. 3
B. 4
C. 1
D. 2
W tym zadaniu łatwo się pomylić, bo wszystkie przyciski na joysticku wyglądają podobnie i na pierwszy rzut oka można założyć, że każdy włącza „jakieś” sekcje belki. Klucz tkwi jednak w zrozumieniu logiki oznaczeń graficznych i kierunku strzałek. Przyciski oznaczone ikonami opryskiwacza bez wyraźnej strzałki kierunkowej często odpowiadają za włączanie wszystkich sekcji naraz lub za tryb 100% szerokości roboczej. To są funkcje typu ON/OFF całej belki, a nie sekwencyjne przełączanie od lewej do prawej. Z kolei symbole z dwiema strzałkami lub z inną orientacją mogą dotyczyć włączania sekcji w przeciwnym kierunku, czyli od prawej do lewej, albo przełączania trybu pracy (np. redukcji szerokości roboczej o kilka sekcji naraz). Typowy błąd polega na tym, że operator patrzy tylko na numer przycisku lub jego położenie, a ignoruje piktogramy. W praktyce polowej kończy się to tym, że zamiast płynnie dołączać sekcje przy wjeździe w szerszy fragment pola, ktoś nagle uruchamia wszystkie dysze, powodując nakładki albo niepotrzebne zużycie środka. Dobre praktyki mówią jasno: przed pracą trzeba przeanalizować schemat sterowania w instrukcji oraz na naklejkach w kabinie, zapamiętać, który przycisk odpowiada za kierunek od lewej do prawej, a który odwrotnie, i ewentualnie zrobić krótką próbę na podwórzu z wyłączonym ciśnieniem roboczym. Dzięki temu podczas pracy w nocy lub w stresie nie ma zgadywania na ślepo. W nowoczesnych opryskiwaczach z ISOBUS i Section Control joystick jest tylko ręcznym interfejsem do sterownika – jeśli użyjemy niewłaściwego przycisku, system zinterpretuje to dokładnie tak, jak mu każemy, nawet jeśli z punktu widzenia agrotechniki jest to kompletnie nieoptymalne. Dlatego wybór przycisku musi być świadomy i oparty na zrozumieniu symboli, a nie intuicyjnym skojarzeniu czy przyzwyczajeniu z innej maszyny.