Pytanie 1
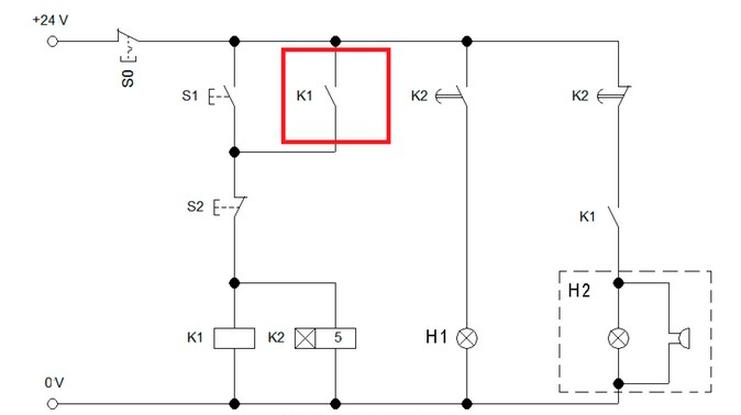
Który symbol graficzny oznacza cewkę przekaźnika o opóźnionym załączaniu?
A. A.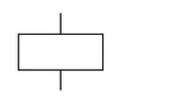
B. D.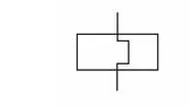
C. C.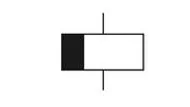
D. B.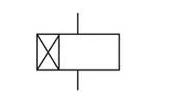
Brak odpowiedzi na to pytanie.
Wyjaśnienie poprawnej odpowiedzi:
Odpowiedź B jest poprawna, ponieważ znak graficzny cewki przekaźnika o opóźnionym załączaniu jest dobrze zdefiniowany w normach dotyczących symboli elektrycznych. Oznaczenie to zawiera charakterystyczny element w postaci dwóch przekątnych linii, które znajdują się w obrębie prostokąta reprezentującego cewkę. Te linie symbolizują opóźnienie czasowe, co jest istotne w kontekście zastosowania przekaźników w systemach automatyki. Przekaźniki o opóźnionym załączaniu są wykorzystywane w wielu aplikacjach, takich jak systemy zabezpieczeń, gdzie potrzebne jest opóźnienie przed aktywacją alarmu, bądź w układach automatyki domowej, gdzie używa się ich do kontroli oświetlenia lub urządzeń. Zrozumienie tego symbolu jest kluczowe dla inżynierów i techników, którzy zajmują się projektowaniem i wdrażaniem systemów elektrycznych, ponieważ pozwala to na prawidłowe interpretowanie schematów oraz zapewnienie ich zgodności z obowiązującymi standardami, takimi jak IEC 60617, co zwiększa przejrzystość i efektywność projektowania systemów elektronicznych.
Odpowiedź B jest poprawna, ponieważ znak graficzny cewki przekaźnika o opóźnionym załączaniu jest dobrze zdefiniowany w normach dotyczących symboli elektrycznych. Oznaczenie to zawiera charakterystyczny element w postaci dwóch przekątnych linii, które znajdują się w obrębie prostokąta reprezentującego cewkę. Te linie symbolizują opóźnienie czasowe, co jest istotne w kontekście zastosowania przekaźników w systemach automatyki. Przekaźniki o opóźnionym załączaniu są wykorzystywane w wielu aplikacjach, takich jak systemy zabezpieczeń, gdzie potrzebne jest opóźnienie przed aktywacją alarmu, bądź w układach automatyki domowej, gdzie używa się ich do kontroli oświetlenia lub urządzeń. Zrozumienie tego symbolu jest kluczowe dla inżynierów i techników, którzy zajmują się projektowaniem i wdrażaniem systemów elektrycznych, ponieważ pozwala to na prawidłowe interpretowanie schematów oraz zapewnienie ich zgodności z obowiązującymi standardami, takimi jak IEC 60617, co zwiększa przejrzystość i efektywność projektowania systemów elektronicznych.