Pytanie 1
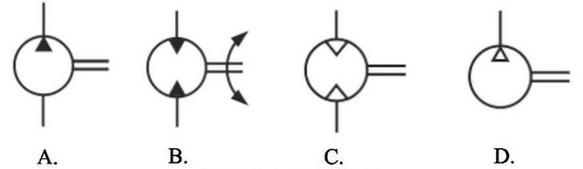
Które urządzenie przedstawione jest na schemacie elektrycznym za pomocą symbolu graficznego?
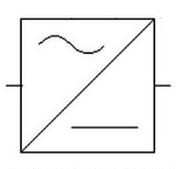
A. Prostownik.
B. Transformator.
C. Generator.
D. Falownik.
Wybór odpowiedzi związanej z generatorem, transformatorem lub falownikiem wynika z nieporozumienia dotyczącego funkcji poszczególnych urządzeń oraz ich symboliki na schematach elektrycznych. Generator to urządzenie, które przekształca energię mechaniczną w energię elektryczną; jego symbol na schemacie różni się od prostownika, ponieważ nie implikuje konwersji prądu AC na DC. Z kolei transformator służy do zmiany poziomu napięcia prądu przemiennego, a jego symbol również jest odmienny, zazwyczaj przedstawiający dwa uzwojenia. Falownik zaś, jak sama nazwa wskazuje, konwertuje prąd stały na prąd przemienny, co jest sprzeczne z funkcją prostownika. Typowym błędem jest założenie, że te urządzenia mają podobną funkcję jedynie na podstawie ich zastosowania w systemach elektrycznych. W rzeczywistości każdy z nich ma specyficzne przeznaczenie i symbolikę, a ich zrozumienie wymaga znajomości podstawowych zasad elektrotechniki oraz różnorodnych zastosowań. Kluczowe jest, aby nie mylić tych funkcji, ponieważ może to prowadzić do błędów w projektowaniu i realizacji systemów zasilania. Zrozumienie i umiejętność interpretacji symboli na schematach elektrycznych są niezbędne dla każdego inżyniera, który pracuje z technologią elektryczną, co podkreśla wagę edukacji w tym zakresie.