Pytanie 1
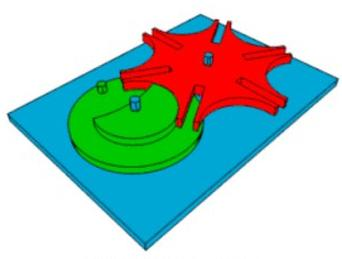
Jakie urządzenie opisuje parametr określany jako liczba stopni swobody?
A. Prasa hydrauliczna
B. Pralka automatyczna
C. Manipulator
D. Kserokopiarka
Manipulator to urządzenie, które charakteryzuje się liczbą stopni swobody, co oznacza, że może poruszać się w wielu kierunkach i na różnych płaszczyznach. Liczba ta wskazuje, ile niezależnych ruchów manipulator może wykonać, co jest kluczowe w kontekście automatyzacji i robotyki. Przykładowo, w robotyce przemysłowej manipulatory stosowane są do precyzyjnego montażu, gdzie wymagana jest zdolność do ruchu w wielu osiach. Manipulatory z sześcioma stopniami swobody potrafią wykonywać ruchy podobne do ruchów ludzkiej ręki, co niezwykle zwiększa ich funkcjonalność. Ważne jest, aby projektowanie robotów uwzględniało standardy ergonomiczne oraz normy bezpieczeństwa, takie jak ISO 10218 dotyczące robotów przemysłowych, aby zapewnić ich efektywność i bezpieczeństwo w użytkowaniu. Wiedza na temat liczby stopni swobody jest kluczowa dla inżynierów i specjalistów zajmujących się automatyzacją, ponieważ pozwala na optymalne dobieranie i programowanie manipulatorów do konkretnych zadań produkcyjnych.