Pytanie 1
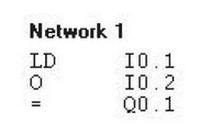
Konwersja programu napisanego w języku LD na kod maszynowy, który jest zrozumiały dla jednostki centralnej PLC, odbywa się w środowisku narzędziowym PLC przy użyciu polecenia
A. download
B. upload
C. compile
D. save as
Odpowiedzi 'download', 'save as' i 'upload' są błędne, bo różnią się całkowicie od kompilacji. 'Download' oznacza, że przesyłamy skompilowany program z komputera do PLC. To się dzieje po tym, jak kompilacja jest zakończona i jest kluczowe, żeby wprowadzić zmiany w programie na urządzeniu. Z kolei 'save as' to po prostu opcja zapisywania pliku pod nową nazwą, co nie ma nic wspólnego z konwersją do kodu maszynowego. Można się pomylić myśląc, że 'save as' ma coś do kompilacji, ale to dotyczy tylko zarządzania plikami. Natomiast 'upload' to coś odwrotnego niż 'download' – to przesyłanie programu z PLC do komputera, i to też nie jest odpowiednie w kontekście kompilacji. Jak się tych terminów nie zrozumie, można zrobić sporo błędów przy pracy z systemami automatyki. Ważne jest, żeby wiedzieć, że bez kompilacji program nie zadziała na PLC, co pokazuje, jak istotny jest ten proces w programowaniu i wdrażaniu systemów przemysłowych.