Pytanie 1
Przedstawione na rysunku przebiegi czasowe są właściwe dla licznika o cyklu zliczania
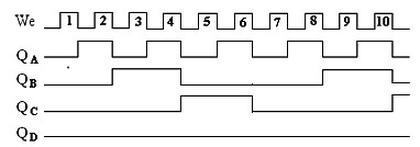
A. 9
B. 6
C. 4
D. 7
Wybór innej liczby jako cyklu zliczania wskazuje na brak zrozumienia fundamentów działania liczników binarnych. Cykle zliczania licznika binarnego są definiowane jako sekwencje, w których licznik przechodzi przez wszystkie możliwe stany, zanim wróci do stanu początkowego. W przypadku 4-bitowego licznika, gdy wszystkie bity są ustawione na niskim poziomie (0000) i zliczają do wartości maksymalnej (1111), pełny cykl zliczania kończy się, gdy licznik powraca do wartości 0, co jest równoznaczne z tym, że wszystkie bity wracają do stanu niskiego. Wybierając liczby takie jak 4, 7, czy 9, pomijasz kluczowe aspekty, które związane są z pełnym cyklem zliczania, jak np. zrozumienie, że cykl ten nie kończy się po osiągnięciu pojedynczego stanu, ale obejmuje przejście przez wszystkie możliwe stany. Typowym błędem jest mylenie momentów czasowych z rzeczywistym stanem wyjściowym liczników, co może prowadzić do nieprawidłowych wniosków w bardziej zaawansowanych aplikacjach, takich jak w systemach osłony czasowej czy w projektach wykorzystujących złożone liczniki o różnych bitach. W praktyce, wiedza o cyklach zliczania jest kluczowa w kontekście projektowania urządzeń cyfrowych, programowania i analizy systemów oraz może znacząco wpłynąć na efektywność procesów w systemach elektronicznych.