Kwalifikacja: ELE.01 - Montaż i obsługa maszyn i urządzeń elektrycznych
Zawód: Elektromechanik
Kategorie: Maszyny i urządzenia elektryczne
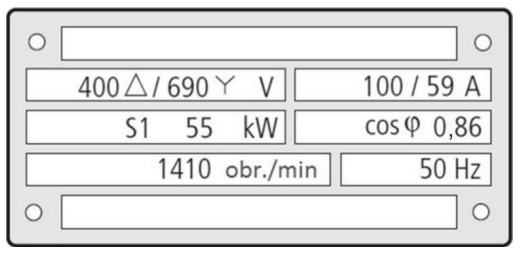
Ile par biegunów magnetycznych ma silnik, którego dane przedstawiono na tabliczce znamionowej pokazanej na rysunku?
Odpowiedzi
Informacja zwrotna
Silnik, którego dane mamy na tabliczce znamionowej, ma prędkość obrotową 1410 obr./min przy częstotliwości zasilania 50 Hz. To wskazuje, że mamy do czynienia z silnikiem indukcyjnym klatkowym, który pracuje z pewnym poślizgiem. Aby obliczyć liczbę par biegunów magnetycznych, używamy wzoru na prędkość synchroniczną: n_s = (120 * f) / p, gdzie n_s to prędkość synchroniczna, f - częstotliwość zasilania, a p - liczba par biegunów. Dla 50 Hz prędkość synchroniczna wynosi 1500 obr./min dla 2 par biegunów (typowa konfiguracja). Ponieważ rzeczywista prędkość to 1410 obr./min, widzimy, że silnik pracuje z typowym poślizgiem dla silników asynchronicznych. W praktyce oznacza to, że silniki z 2 parami biegunów są często stosowane w aplikacjach przemysłowych, gdzie wymagana jest niezawodna praca przy określonych obrotach. Dodatkowo, silniki o takiej konfiguracji są często wybierane ze względu na ich efektywność w stosunku do kosztów eksploatacji.